
在介绍伺服电机的工作原理之前,我们首先来明确一下什么是伺服:伺服:一词源于希腊语"奴隶"的意思。人们想把"伺服机构"当个得心应手的驯服工具,服从控制信号的要求而动作。在讯号来到之前,转子静止不动;讯号来到之后,转子立即转动;当讯号消失,转子能即时自行停转。由于它的"伺服"性能,因此而得名。
那么它的工作原理又是哪些呢?
伺服系统:是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。伺服的主要任务是按控制命令的要求、对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制的非常灵活方便。
伺服电机是一个典型闭环反馈系统,减速齿轮组由电机驱动,其终端(输出端)带动一个线性的比例电位器作位置检测,该电位器把转角坐标转换为一比例电压反馈给控制线路板,控制线路板将其与输入的控制脉冲信号比较,产生纠正脉冲,并驱动电机正向或反向地转动,使齿轮组的输出位置与期望值相符,令纠正脉冲趋于为0,从而达到使伺服电机精确定位的目的。
伺服电机的控制:
标准的伺服电机有三条控制线,分别为:电源、地线及控制。电源线与地线用于提供内部的电机及控制线路所需的能源,电压通常介于4V-6V之间,该电源应尽可能与处理系统的电源隔离(因为伺服电机会产生噪音)。甚至小伺服电机在重负载时也会拉低放大器的电压,所以整个系统的电源供应的比例必须合理。输入一个周期性的正向脉冲信号,这个周期性脉冲信号的高电平时间通常在1ms-2ms之间,而低电平时间应在5ms到20ms之间。
伺服电机内部的转于是永磁铁,驱动gS控制的u/V/W三相电形成电磁场 转子在此礤场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较 调整转子转动的角度。伺服电机的精度决定于编码器的精度{线数)。两相电机和四相电机有何不同?真正的两相步进电机在定子上只有2个绕组,有4相出线,一般整步步距角为1.8半步为o。9"。在驱动器中,只要对两相绕组电流通断和电流方向进行控制就可以了。而4相步进电机在定子上有四个绕组,有8根出线,整步为O.9,半步为0.45 .不过在驱动器中需要刘4个绕组进行控制, 电路的复杂性和成本都明显增加。所以一般我们都选择两相电机配两相驱动器.如果需要更小的步距角,可以采用细分驱动器。不过细心的用户会发现,四通电机公司生产的电机称为两相,实际有两相4线的,也有四相日线的;驱动器中有两相的却没有四相的。这是因为,四相绕组两两并联或串联后就成为两相绕组,这样四相电机就变成两相电机了,而串联和并联会带来电机.的绕组电阻和电感的成倍变化.从而带来电机运行性能的明显变化。一般来说,并联使用时,电机有较好的加速性能.高速力矩保持得好,但是电机需要输入2倍‘额定电流的电流.发热较大.对驱动器输出能力的要求相应提高;而在串联使用时,电机有较好的低速稳定性,噪声和发热较小,对驱动器要求不高 但是高速力矩损失较大。四通提供的驱动器全部呈两相的,所以电机也必须改接咸两相使用。这就是为什么我们往往要问客户电机,希望接成串联的还是并联的。过去我们的8线电机标成四相,但是经常造成客户误会.认为四相电机.和两相驱动器不匹配为了减少类似麻烦,后来将电机均标成两相的了。所以,我们有晌简单回答这个问题 两相电机.和四相电机实质上是一回事。两相和五相的混合式步进电机的应用场合有何一般来说.两相电机,步距角大.高速特性好,但是存在低速振动区。而五相电机步距角小,低速运行平稳,所以,在刘电机的运转精度要求较高,且主要在中低速段(一般低于日OOr/min) 的场合应选用五相电机.;反之,若追求电机的高速性能,刘精度及平稳性无太多要求的场合应选用成本较低的两相电机。另外.五相电机的力矩通常在2NM以上,对小力矩的应用,一般采用两相电机,而低速平稳性的问题可以通过采用细分驱动器的方式解决。如何控制步进电机的转动方向?当您的控制韶(上位机)发出的是双脉冲[即正负脉冲)或脉冲信号的幅值不匹配时,需要用我们的信号模块转换为5V单脉冲(脉:中加方向)。
(1)输入为双脉冲
信号模块的拨码开关应拨到·双脉:中·位置。当发正脉;中的,电机正转; 当发负脉冲的,电机反转。正负脉冲不可同时给,具体时序可参照信号模块说明书。
(2)输入为单脉冲
信号模块的拨码开关应拨到单脉冲"位置。当有脉冲输出时电机转动。改变方向信号的高低电平可改变电机转动方向。具体时序可参照信号模块说明书。伺服电机和步进电机相比,有何优势?和步进电机相比,伺服电机.有
以下几点优势
(1)实现了位置,速度和力矩的闭环控制.克服了步进电机.失步的问题。
(2)高速性能好,一般额定转速能达到2000一3000r/m巾。
(3)抗过载能力强,能承受三倍于额定转矩的负载,对有瞬间负载波动和要求快速起动的场合特别适用。
(4)低速运行平稳.低速运行时不会产生类似于步进电机的步进运行现象。适用于有高速响应要求的
(5)电机加减速的动态相应肘间-般在几个毫秒之内。
(6)发热和噪声明显降低。如果对动态响应要求比较高,建议选择电机的转动惯量最好为负载转动惯量的2倍,否则只要负载的转动惯量小于电机的转动惯量即可。
步进电机.选型步骤:
(1)确定驱动机械装置
(2)计算负载力矩。
(3)计算负载惯量
SLS系列交流永磁伺服电动机与相应伺服驱动装置配套后构成的相互协调的系统,可广泛应用于机床、纺织、塑机、印染、印刷、建材、雷达、火炮、注塑机等领域。
SLS系列交流永磁伺服电动机由定子、转子、高精度反馈元件(如:光电编码器、旋转变压器等)组成。采用高性能稀土永磁材料形成气隙磁场,采用无机壳定子铁芯,温度梯度大,散热效率高,具有如下优点:
◆结构紧凑,功率密度高;
◆转子惯量小,响应速度快;
◆超高内禀矫顽力稀土永磁材料,抗去磁能力强;
◆几乎在整个转速范围内可恒转矩输出;
◆低速转矩脉动小,平衡精度高,高度运行平衡;
◆噪音低,振动小;
◆全密封设计;
◆性能价格比高。
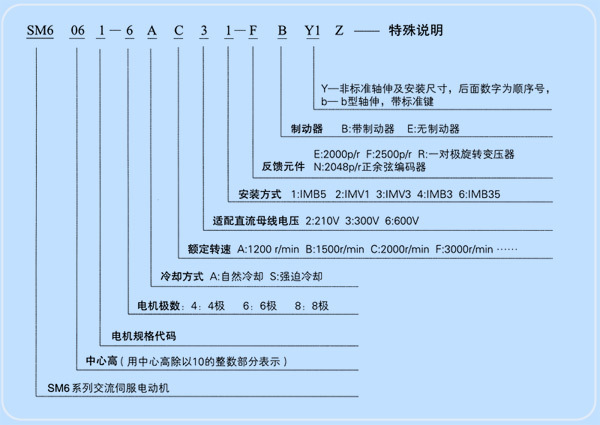
型号说明:
技术数据:
电机类型 | 交流伺服电机(永磁同步电机) |
磁性材料 | · 超高内禀矫顽力稀土永磁材料 |
安装型式 | · IMB5备选:IMV1 、IMV3、IMB35 |
轴承 | · 双面密封深沟球轴承 |
震动等级 | · N级 备选;R级 ,S级 |
噪音 | SM603≤55dB(A) SM604≤55dB(A) SM605≤60dB(A) |
连接 | · 接插件(SM603-SM610) 备选;出线盒 |
选件 | · 免修护高可靠永磁安全全制驱动(德国产) |
以上为参考数据,随着技术的不断进步和变化,,数据可能有所变动,恕不另行通知;且不同品牌有数据差异,以订货时所确定的具体品牌参数和说明书参数为准。
'




