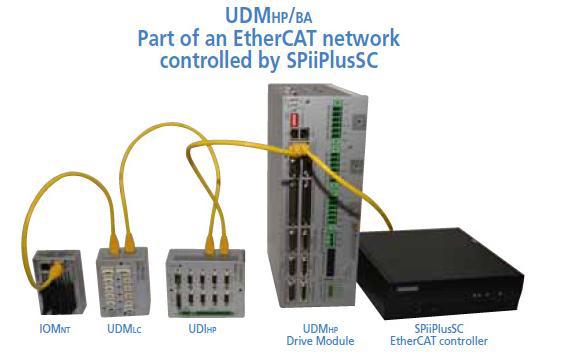
UDMHP/BA 3个驱动器,至320VDC,15A/30A
系列经济型EtherCAT驱动模块至3个通用型驱动器。UDMHP定位与那些高精度需求的应用。UDMBA是个更经济的版本。模块由AC电压85-230VAC供电和提供下面的几种电流;5A/10A(连续/峰值),10A/20A和15A/30A.它支持下面的位置反馈设备,增量数字(共4个),模拟量sin-cos(3个),和绝对值(3个)母线电压,一个独立的24VDC供电电源可以在紧急情况下保持所有逻辑信号正常工作。可支持各种位置反馈装置,增量式数字编码器(共四个),模拟量(sin-cos)编码器和绝对值编码器。
ACS
为性能设计的强大平台
ACS强大的平台由EtherCAT主站MPU(运动处理器)和在每个EtherCAT从站上的伺服处理器(SPil).MPU可以管理至多达64个同步轴的系统,执行高水平任务,比如通讯ACSPL+和PLC编程,诊断1/o控制和轨迹的规划。在每个节点上的SPil浮点处理器执行时控制算法最多到4个轴,他们每个轴的采样和刷新率都是20KHZ.
MPU可以修改和刷新SPil控制算法,插入激励信号到控制对象并采样实时数据,比如20KHZ的位置误差。
ACS利用分布式处理器平台已经超过20年了。采用EtherCAT对来说是很自然的演变。分布式系统遇到的所有逻辑和安全相关的问题都在很久前解决(比如控制器,节点和通讯连接故障失效系统的响应,MPU失效轴会发生什么问题)。使ACS在当今的工业中能够提供最坚固的EtherCAT控制解决方案。
高度集成,增加精确度和产量
性能取决于所有的器件-控制器,软件,驱动器,电源的内部连接和支持工具。这些部件的每个部分在设计和优化过程中为了成就一个目标,增加你的机器的性能。完整的系统通过测试确保运动性能不处在将就的水平。