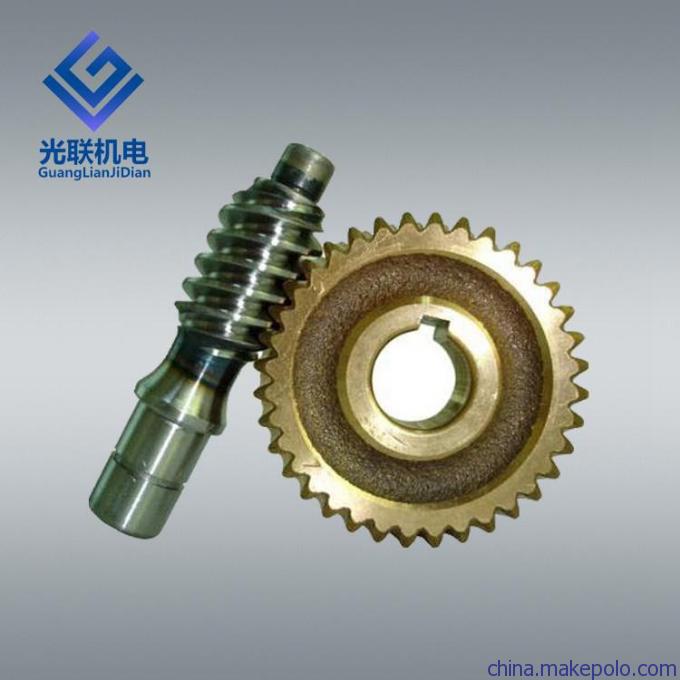
一、用途:
蜗轮蜗杆机构常用来传递两交错轴之间的运动和动力。蜗轮与蜗杆在其中间平面内相当于齿轮与齿条,蜗杆又与螺杆形状相似。
二、基本参数:
模数m、压力角、蜗杆直径系数q、导程角、蜗杆头数 、蜗轮齿数、齿顶高系数(取1)及顶隙系数(取0.2)。其中,模数m和压力角是指蜗杆轴面的模数和压力角,亦即蜗轮端面的模数和压力角,且均为标准值;蜗杆直径系数q为蜗杆分度圆直径与其模数m的比值。
三、蜗轮蜗杆正确啮合的条件
1.中间平面内蜗杆与蜗轮的模数和压力角分别相等,即蜗轮的端面模数等于蜗杆的轴面模数且为标准值;蜗轮的端面压力角应等于蜗杆的轴面压力角且为标准值,即 ==m ,==
2.当蜗轮蜗杆的交错角为时,还需保证,而且蜗轮与蜗杆螺旋线旋向必须相同。
四 、几何尺寸计算与圆柱齿轮基本相同,需注意的几个问题是:
1.蜗杆导程角()是蜗杆分度圆柱上螺旋线的切线与蜗杆端面之间的夹角,与螺杆螺旋角的关系为,蜗轮的螺旋角,大则传动效率高,当小于啮合齿间当量摩擦角时,机构自锁。
2.引入蜗杆直径系数q是为了限制蜗轮滚刀的数目,使蜗杆分度圆直径进行了标准化m一定时,q大则大,蜗杆轴的刚度及强度相应增大;一定时,q小则导程角增大,传动效率相应提高。
3.蜗杆头数推荐值为1、2、4、6,当取小值时,其传动比大,且具有自锁性;当取大值时,传动效率高。
与圆柱齿轮传动不同,蜗杆蜗轮机构传动比不等于,而是,蜗杆蜗轮机构的中心距不等于,而是。
4.蜗杆蜗轮传动中蜗轮转向的判定方法,可根据啮合点K方向(平行于螺旋线的切线)及应垂直于蜗轮轴线画速度矢量三角形来判定;也可用“右旋蜗杆左手握,左旋蜗杆右手握,四指拇指”来判定。
五、蜗轮及蜗杆机构的特点
1.可以得到很大的传动比,比交错轴斜齿轮机构紧凑
2.两轮啮合齿面间为线接触,其承载能力大大高于交错轴斜齿轮机构
3.蜗杆传动相当于螺旋传动,为多齿啮合传动,故传动平稳、噪音很小
4.具有自锁性。当蜗杆的导程角小于啮合轮齿间的当量摩擦角时,机构具有自锁性,可实现反向自锁,即只能由蜗杆带动蜗轮,而不能由蜗轮带动蜗杆。如在其重机械中使用的自锁蜗杆机构,其反向自锁性可起安全保护作用。
5.传动效率较低,磨损较严重。蜗轮蜗杆啮合传动时,啮合轮齿间的相对滑动速度大,故摩擦损耗大、效率低。另一方面,相对滑动速度大使齿面磨损严重、发热严重,为了散热和减小磨损,常采用价格较为昂贵的减摩性与抗磨性较好的材料及良好的润滑装置,因而成本较高
6.蜗杆轴向力较大
六、应用
蜗轮及蜗杆机构常被用于两轴交错、传动比大、传动功率不大或间歇工作的场合。


咨询热线:0398-5882881 15138170266 400-00-85102
QQ:383320673
公司地址:河南义马市银杏国际大厦15楼






