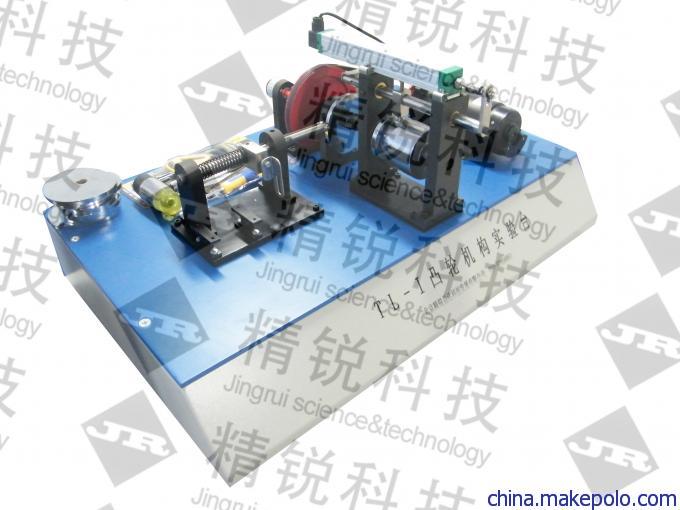
技术参数:
1、电机功率:125w/220v;
2、调速方式及范围:无级调速,0~400r/min;
3、盘形凸轮:基圆半径R0=37.5mm;最大升程hmax=20mm;圆柱凸轮:升程角
a=15°;升程H=38.5mm;
4、直线位移传感器:L=200mm;
5、光栅角位移传感器:1000栅/转;
6、外形尺寸:700×480×420;
7、重量:51kg
基本配置:
1、电机1台
2、圆柱凸轮(一种),盘形凸轮(等速运动规律、等加速等减速运动规律、多相式运动规律、余弦运动规律、正弦运动规律、改进梯形运动规律等八种);
3、滚子推杆一种;
4、直线位移传感器1个;
5、角位移传感器1个;
6、控制系统1套
7、教学软件1套
8、随机工具1套
实验目的:
1、对基本平面机构的设计及运动学、动力学分析
实验项目:
1、盘形凸轮虚拟设计及实物拼装(能拼装盘形凸轮和圆柱凸轮两种凸轮机构);
2、盘形凸轮(8种)和圆柱凸轮的廓线运动规律仿真及检测;
3、系统速度波动检测及调节。
性能他点:
1、检测系统集数据采集与电机调节控制于一体;
2、测试系统以串口通讯,测试数据精度高、速度快、稳定;
3、驱动直流电机可进行无级调速,以满足实验机构的不同运动要求;
4、测试分析软件设置有实验教学界面,方便学生自己动手进行实验,适应开放性实验教学的需要;培养学生机电一体化的设计概念
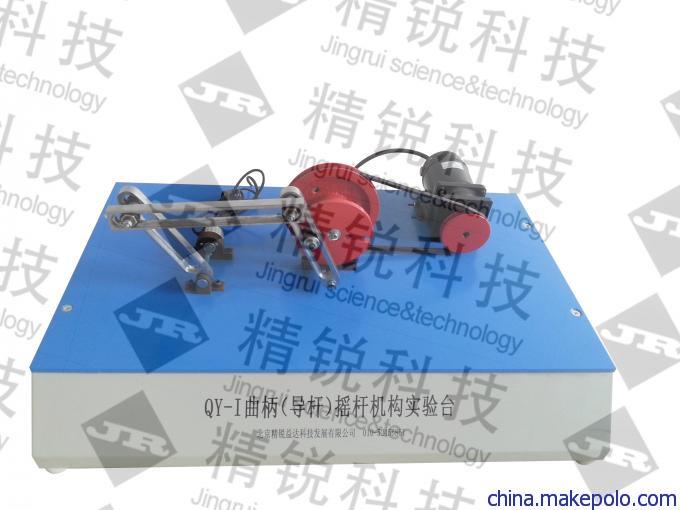
技术参数:
1、直流电机功率:125w/220v;
2、电机调速方式及范围:无级调速,0-400 r/min;
3、曲柄长度可调范围:20~60mm;导杆长度可调范围:50~150mm;连杆长度可调范围:50~220mm;摇杆长度可调范围:50~150mm;
4、角位移传感器:1000栅/转
5、外形尺寸:700×480×420;
6、重量:47kg
基本配置:
1、电机:1台
2、角位移传感器2个;
3、控制系统1套
4、教学软件1套
5、随机工具1套
实验目的:
1、对基本平面机构的设计及运动学、动力学分析
实验项目:
1、四杆机构,曲柄(导杆)摇杆机构的虚拟设计及实物机构拼(能拼装曲柄摇杆机构、双曲柄机构、双摇杆机构、曲柄导杆机构);
2、曲柄的运动检测,摇杆运动仿真及实测对比分析;
3、机架振动检测及机构平衡实验;
4、连杆运动平面上点的运动轨迹图谱虚拟分析。
性能特点:
1、所有杆构件长度均可进行无级调节;
2、实验机构配置对称机构,可测试分析对称机构和不对称机构的平衡性能。
3、检测系统集数据采集与电机调节控制于一体;
4、测试系统以串口通讯,测试数据精度高、速度快、稳定;
5、驱动直流电机可进行无级调速,以满足实验机构的不同运动要求;
6、测试分析软件设置有实验教学界面,方便学生自己动手进行实验,适应开放性实验教学的需要;培养学生机电一体化的设计概念





