鑫硕智能彩钢夹芯板自动码垛机器人

辽宁鑫硕智能机械有限公司
中国 朝阳
产品属性
图文详情
品牌推荐
品牌
其他
型号
鑫硕智能
类型
码垛机
【辽宁鑫硕智能机械 0421-2885869】随着现代化生产的快速发展,各行各业都已逐步使用了工业码垛机器人,工业自动化的理念已然深入。在各类机器人之中,山东工业码垛机器人以其优异特性得到了诸多加工生产企业的青睐。
现代工业生产加工对产品的运输过程很重视,让工业码垛机器人成为了现代生产加工中不可缺少的一款机械设备,特别是在现代自动化的时代,企业对产品码垛的需求与日俱增,自动化工业码垛机器人已成为产业发展的主流。
当前,自动化工业码垛机器人在我国工业领域的应用十分广泛,在化工、建材、食品、自动化物流等行业自动化都得到了广泛的应用,受到众多生产行业的青睐。
自动化工业码垛机器人的使用促进了生产产品各方面的管理,给生产企业带来了规范、秩序,也提高了生产工作效率。如今生产行业在工业码垛机器人的引领下不断促进企业发展,生产市场呈现了空前繁华的场面。
随着各行业的不断发展,全自动码垛机发挥着越来越重要的作用,它不仅可以准确、高效地完成码垛作业,而且可以降低工人的劳动强度,提高产品品质。
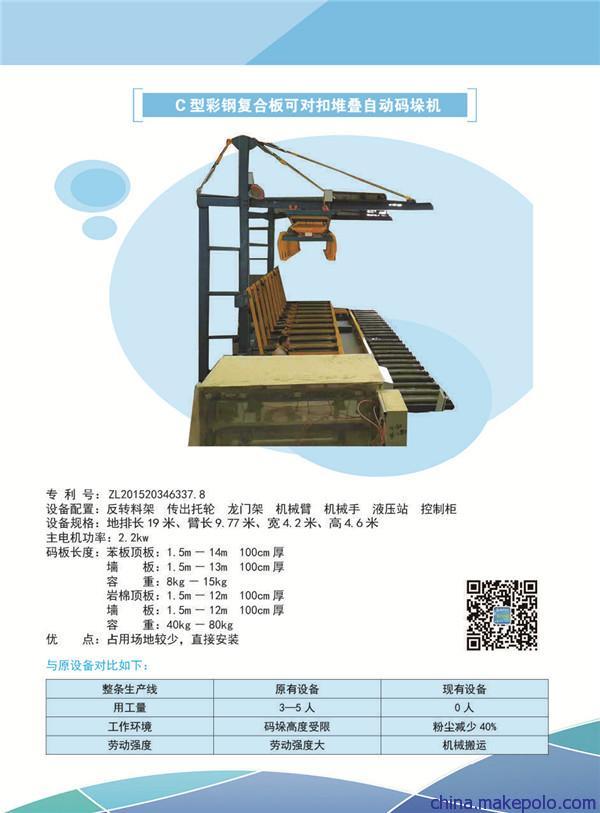
全自动码垛机为4轴机器人。4根运动轴对应直角坐标系中的X轴、Y轴和Z轴,以及Z轴上带有的一个旋转轴。全自动码垛机的优点有很多,总结起来主要有几点:
第一,结构简单、零部件少、故障率低。
第二,占地面积少。有利于客户厂房中生产线的布置,并可留出较大的库房面积。码垛机器人可以设置在狭窄的空间,即可有效的使用。
第三,适用性强。当客户产品的尺寸、体积、形状及托盘的外形尺寸发生变化时只需在触摸屏上稍做修改即可,不会影响客户的正常的生产。而机械式的码垛机更改相当的麻烦甚至上是无法实现的。
第四,能耗低。通常机械式的码垛机的功率在26KW左右,而全自动码垛机的功率为5KW左右。大大降低了客户的运行成本。
第五,全部控制可在控制柜屏幕上操作即可,操作非常简单。第六,只需定位抓起点和摆放点,教示方法简单易懂。
下面主要介绍下全自动码垛机的机械手部分:
全自动码垛机械手的设计原理是以人的手为基础,以机械拉来实现人的动作,它的动作由以下四部分来实现:自由度的旋转、肩的前后动作、肘的上下动作、腕(手)的动作。
工业全自动码垛机械手的结构是基于模组块系统上的,模组块系统适合于提高移动的速度或特殊类型的工作。在设计上考虑维修的简单性。维修的人员需要具备一定的资格,应能处理一般的机械设备的问题或通常液压件的安装。
该控制系统的设计是可以给操作臂一个信号的动力反馈系统。该工作臂类似一个伸缩仪。在方位、肩部和肘部上的三个轴直接控制位置,利用主臂控制速度。
在全自动码垛机械手的操作柄有一个按钮来控制工作头(降低、翻转、倾斜和抓住的装置)。控制系统的特性是可以使操纵器以一定的速度和精确性进行工作。
在工作过程中,当工件过来后,将光挡住,此时相当输入一个信号系统,手开始抓。然后,全自动码垛机械手开始进行上升,转动和下降运动。
现代工业生产加工对产品的运输过程很重视,让工业码垛机器人成为了现代生产加工中不可缺少的一款机械设备,特别是在现代自动化的时代,企业对产品码垛的需求与日俱增,自动化工业码垛机器人已成为产业发展的主流。
当前,自动化工业码垛机器人在我国工业领域的应用十分广泛,在化工、建材、食品、自动化物流等行业自动化都得到了广泛的应用,受到众多生产行业的青睐。
自动化工业码垛机器人的使用促进了生产产品各方面的管理,给生产企业带来了规范、秩序,也提高了生产工作效率。如今生产行业在工业码垛机器人的引领下不断促进企业发展,生产市场呈现了空前繁华的场面。
随着各行业的不断发展,全自动码垛机发挥着越来越重要的作用,它不仅可以准确、高效地完成码垛作业,而且可以降低工人的劳动强度,提高产品品质。
全自动码垛机为4轴机器人。4根运动轴对应直角坐标系中的X轴、Y轴和Z轴,以及Z轴上带有的一个旋转轴。全自动码垛机的优点有很多,总结起来主要有几点:
第一,结构简单、零部件少、故障率低。
第二,占地面积少。有利于客户厂房中生产线的布置,并可留出较大的库房面积。码垛机器人可以设置在狭窄的空间,即可有效的使用。
第三,适用性强。当客户产品的尺寸、体积、形状及托盘的外形尺寸发生变化时只需在触摸屏上稍做修改即可,不会影响客户的正常的生产。而机械式的码垛机更改相当的麻烦甚至上是无法实现的。
第四,能耗低。通常机械式的码垛机的功率在26KW左右,而全自动码垛机的功率为5KW左右。大大降低了客户的运行成本。
第五,全部控制可在控制柜屏幕上操作即可,操作非常简单。第六,只需定位抓起点和摆放点,教示方法简单易懂。
下面主要介绍下全自动码垛机的机械手部分:
全自动码垛机械手的设计原理是以人的手为基础,以机械拉来实现人的动作,它的动作由以下四部分来实现:自由度的旋转、肩的前后动作、肘的上下动作、腕(手)的动作。
工业全自动码垛机械手的结构是基于模组块系统上的,模组块系统适合于提高移动的速度或特殊类型的工作。在设计上考虑维修的简单性。维修的人员需要具备一定的资格,应能处理一般的机械设备的问题或通常液压件的安装。
该控制系统的设计是可以给操作臂一个信号的动力反馈系统。该工作臂类似一个伸缩仪。在方位、肩部和肘部上的三个轴直接控制位置,利用主臂控制速度。
在全自动码垛机械手的操作柄有一个按钮来控制工作头(降低、翻转、倾斜和抓住的装置)。控制系统的特性是可以使操纵器以一定的速度和精确性进行工作。
在工作过程中,当工件过来后,将光挡住,此时相当输入一个信号系统,手开始抓。然后,全自动码垛机械手开始进行上升,转动和下降运动。




