系统介绍
1.设计原则lwh0220煤矿电机车运输监控系统建设遵循以下设计原则:
遵循“四高”的设计原则,即高可靠性、高技术、高质量、高效率。
Ø 系统设计采用先进的通信、监测、信息处理、计算机等技术构建,以无线传感器网络为技术基础的井下机车运输监控系统,使用工业以太环网网络(或CAN总线)和无线传感器网络的网络结构。。
Ø 在技术上应达到先进性和成熟性的统一,性能上具有很高的安全可靠性;使用上具有维护性和可扩展性。
Ø 具有完整的知识产权,并且获得国家安全标志证书;
Ø 模块化原则,硬件都拥有知识产权,使系统具有较强的扩展能力;
Ø 可靠性原则,所选设备具备抵御环境影响的能力;工作稳定可靠;
Ø 先进、应用、可靠、节约、后期服务体系完善的原则。
Ø 系统能够融入工业以太环网。
 2.设计依据
2.设计依据《煤矿井下轨道运输信号设计规范》;
《井下轨道运输信号系统技术装备标准》;
《煤矿安全规程》;
《煤炭工业矿井设计规范》;
《煤矿安全装备基本要求》;
《煤矿监控系统总体设计规范》;
《煤矿安全生产监控系统软件通用技术要求》;
《爆炸性环境用防爆电气设备本质安全型电路和电气设备要求》;
《爆炸性环境用防爆电气设备通用要求》;
《煤炭调度信息化装备技术 规范》;
《监测监控质量标准化实施标准》;
《电子计算机场地通用规范》。
3.系统可实现的功能(所有功能都可根据矿方要求简配)3.1 定位显示功能:(定位方式二选一)
精确定位:实时精确动画显示机车位置、车号、车型,车方向等。采用自主研发UWB定位技术,最大定位精度1米内。
惯性定位:实时精确动画显示机车位置、车号、车型,车方向等。采用自主研发的无线惯性定位技术,最大定位精度1米内。
高速实时响应:设备状态变化到上位机响应时间周期在1秒内完成。
3.2 可视化监视功能:在计算机上以动画、图形、表格、汉字等形式实时显示机车位置、车号、运行方向、机车运行相对速度以及井下各信号灯运行状态信息。
3.3 信号闭锁功能:系统根据机车位置,自动、半自动或手动控制信号灯进行敌对进来信号闭锁,有效防止事故发生,指挥机车运行,提高运输效率。
在单行巷道躲避硐室两边安装两台信号灯,在丁字路口和十字路口安装由三台或四台信号灯组成的交通信号控制装置,由系统对机车占用区间进行分析后自动指挥机车运行,防止机车运行进路冲突。当有特种车辆需要经过这种路口时,特种车辆优先实现对信号的长行程控制,提高运输效率。
3.4 智能调度功能:系统软件包含具有科学算法的智能调度模块。分为全自动、半自动和手动模式。
全自动调度模式:在全自动调度模式下,调度模块根据运输计划预先设定的运输线路选择需要的线路给机车。软件具有行程进路自动冲突检测功能,还可以给车载机发送调度信息,提示司机按照调度要求驾驶机车,实现自动调度控制功能。
半自动调度模式:系统在半自动调度模式下,调度员在软件界面给此辆机车赋予一个运输行程。软件具有行程进路自动冲突检测功能,还可以给车载机发送调度信息,提示司机按照调度要求驾驶机车,从而实现半自动调度控制功能。
手动调度模式:进入手动调度状态后,调度员可以远程控制道岔、信号灯来开放或闭锁运输路线,给车载机发送调度信息,提示司机按照调度要求驾驶机车,实现远程手动调度功能。
3.5 系统报警功能:可实现相对超速报警、闯红灯报警及设备故障报警等功能,上位机以图形提示报警并可进行报警报表查询。
3.6 车联网报警功能:现场设备不通过上位机可以实现防追尾(需要配备无线尾灯)、防丢车(需要配备无线尾灯)、防超速、打点报警(需要配备无线发射器)、人车报站功能(车载系统增加声光报警器)、弯道报警功能(需配备无线声光报警器)、双驾驶室机车双车载机联网等功能。
3.7 信息管理功能:可以对机车运行进行自动统计管理,有行车记录及图表,并能生成各种生产管理报表和机车管理报表。
3.8 远程控制功能:系统软件可以下发命令到信号灯、道岔、车载机。对道岔具有远程集中控制、司机遥控、手动及闭锁控制方式。
1)集中控制:是由调度员在地面集控中心的主控微机的图形上通过点击道岔指挥机车运行;
2)司机遥控:为机车司机使用司机室的车载机远距离遥控道岔动作;
3)手动控制:方式为现场人员可以就地操作道岔动作。
4)闭锁控制:为上位机可以发送闭锁命令给道岔设备,让现场不能手动或遥控。
3.9 重演功能:能全天候24 小时实时记录系统运行情况,并能根据记录的运行数据在显示设备上重演规定时间内的机车实际运行过程,为分析事故原因、改进调度策略提供根据,记录存储时间为一年。
3.10 故障诊断与维护功能: 系统能随时反应系统设备和传感器的工作状态,能自动进行设备故障诊断并完成报警及报表查询。
3.11 双机备份功能:上位机可采用主备双系统结构,确保系统运行的安全可靠性,当任一台发生故障时,另一台备用机可以起到主机的监控作用。其中一台可兼作为工程师站,允许远程编辑、调整设备的运行状态和运行参数。
3.12 其他功能:各硬件设备、系统线路自检功能的查询,历史数据的显示、查询、报表、打印等等。
3.13 弯道互锁报警功能:机车与弯道报警器之间通过无线识别,可以实现具有互锁功能的弯道报警功能(每个弯道需配备两台无线声光报警器),无需通过上位机或额外的传感器配合。
3.14 集成联网功能:系统具有OPC软件功能,能平滑地接入自动化集中控制信息平台,矿调度室可直接采用IE浏览器浏览本系统的监控画面。
3.15 LED屏信息发布功能:如果井下关键路口或停车场接入本公司LED信息发布屏,可实现系统信息发布到现场的功能。只要用系统软件输入任何文字,就可以让井下任何一个LED屏显示想要的信息,显示的同时还同步发语音。(此LED屏为本系统联网专用)
3.16 网络视频监控功能:如果井下关键路口或停车场安装网络摄像仪,可实现以系统主画面为地理信息的视频监控功能。只要在主画面中点击需要查看的摄像仪图标,就可以打开那个摄像仪的视频画面。(也可配备为测速摄像仪)
3.17 与WIFI语音通信系统融合应用:为了更好地实现对机车进行调度,可增加WIFI语音通信系统与机车运输监控系统配合使用。可以实现任何一个司机与调度员及任何两个司机之间进行语音对讲。WIFI语音通信系统与运输监控系统通信干线网络共用,有效节约了矿方投资成本。
3.18 快速录入功能:井下人员携带手持终端,形成物料订单的同时还可以往识别卡写信息,以此来确定车辆所运载的物料种类。
3.19 无人驾驶功能:系统具有精确的机车定位及轨道识别能力,具有自动冗余的总线带宽适应性和快速响应能力,加上基于科学算法的智能调度模块,为后续无人驾驶调度功能扩展打下坚实的基础。只要在每台机车上增加无人驾驶子系统硬件模块,不需要再增加其他通信设备就可以实现无人驾驶运输调度系统,因此本系统具有后续的无人驾驶系统无缝扩展能力,并能有效减少二次投资。
3.20 车皮管理功能:如果在关键轨道路口安装车辆管理读卡器,在每个车辆上安装车皮信标,系统软件可按位置、车号或车皮号、时间、进行车皮定位查询;生成运输生产报表;实时监控机车所带载车皮信息。
3.21 矿车租赁:由于很多矿实现内部管理的市场化,为了提高效率采取矿车租赁,通过租赁的时间、数量来付一定的费用,如果到了时间仍不归还则要做出处罚措施并生成考核。
4.系统优势4.1 惯性定位煤矿运输管理系统采用最新物联网硬件技术和软技术,对运输监控功能进行深入研究后大胆进行多项技术创新。本系统除了基本信集闭功能外,还具备如下创新功能:
序号 | 特点 | 说明 |
1 | 精确机车定位 | 采用本公司独创的无线惯性定位技术,定位精度可达1米内。实时精确动画显示机车位置、车号、车型、方向等。 |
2 | 无线弯道报警 | 无需系统配合,现场每个弯道安装两台我公司的无线弯道报警器,可以识别机车位置实现弯道互锁报警功能。有效防止弯道错车碰撞事故发生。 |
3 | 完善的机车调度机制 | 采用可配置策略表软件技术,实现自动、半自动和手动调度完美结合。 |
4 | 可扩展LED屏信息发布 | 如果井下关键路口或停车场接入本公司LED信息发布屏,可实现系统信息发布到现场的功能。只要用系统软件输入任何文字,就可以让井下任何一个LED屏显示想要的信息,显示的同时还同步发语音。 |
5 | 视频组态完美结合 | 以系统主画面为地理信息与视频监控无缝融合,让调度员能快速找到需要查看的视频信息。如果摄像仪有云台,调度员还可以在系统画面中控制云台动作。 |
6 | WEB多客户端 | 上位机软件为B/S构架,服务器可以连接多个WEB客户端,无需在客户端电脑安装任何应用软件.所有WED客户端都是平等的,高级用户登录后都可以操作任何应用功能。 |
7 | 开放的系统接口 | 系统软件具有多种接口来接入矿方系统集成软件。 |
UWB(Ultra Wideband)是一种无载波通信技术,利用纳秒至微秒级的非正弦波 窄脉冲传输数据。UWB 调制采用脉冲宽度在 ns 级的快速上升和下降脉冲, 脉冲 覆盖的频谱从直流至 GHz,不需常规窄带调制所需的 RF 频率变换,脉冲成型后可直接送至天线发射。频谱形状可通过甚窄持续单脉冲形状和天线负载特征来调 整。UWB 信号的辐射非常低,通常只有手机辐射的千分之一,因此在工业上应用时,其不存在对其他仪器仪表的干扰问题。
其他一些定位技术的整体比较:
定位技术 | 定位精度 | 安全性 | 穿透性 | 抗干扰 | 功耗 | 辐射 | 传输距离 |
Wi-Fi | 3~10m | 较高 | 强 | 较强 | 高 | 较高 | 30~50m |
蓝牙 | 3~5m | 较高 | 弱 | 弱 | 较低 | 较低 | 10m |
地磁 | 2~5m | 较高 | NA | 极弱 | 较低 | NA | NA |
RFID | 1-8m | 低 | 弱 | 弱 | 低或无 | 低 | 15m |
ZigBee | 3~10m | 较低 | 弱 | 弱 | 低 | 较高 | 70m |
UWB | 0.3m | 非常高 | 强 | 强 | 低 | 低 | >300m |
红外 | 5~10m | 高 | NA | 弱 | 高 | 低 | 5m |
超声波 | 0.01~0.1m | 高 | NA | 强 | 高 | 低 | 5m |
机器视觉 | 1~2m | 较高 | NA | 弱 | 高 | NA | 10m |
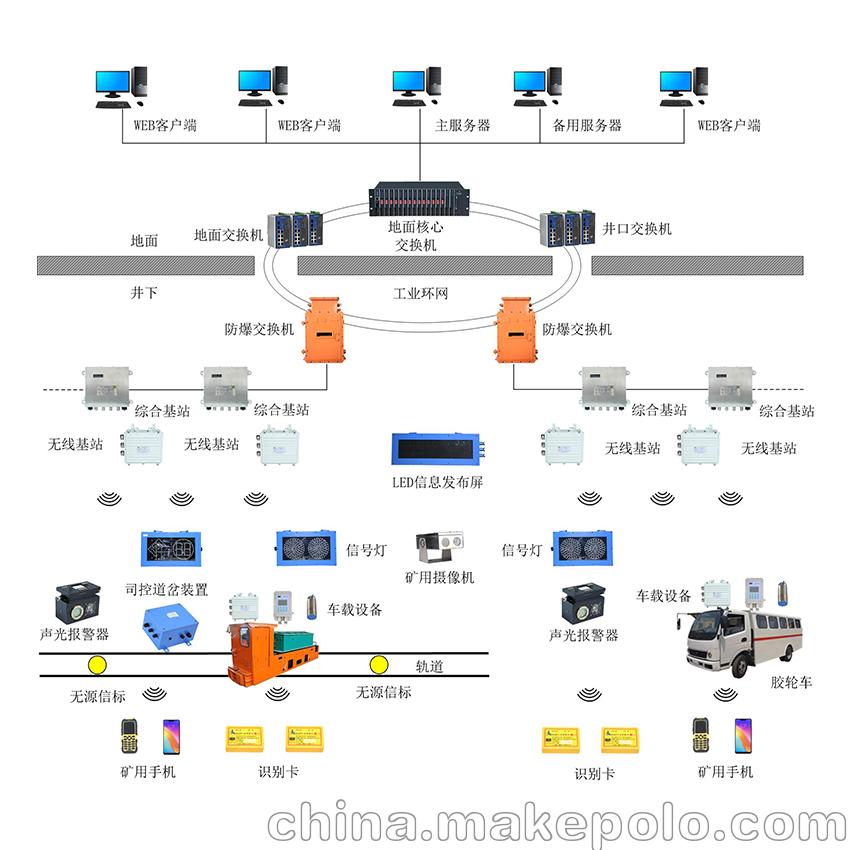
本系统上位机软件采用B/S构架,可以实现多WEB客户端应用。硬件采用CAN总线和以太网作为传输层进行通信,现场CAN总线连接的具有无线协调器功能的KJ1206-F1无线监控分站(无线网关)到以太网网关,然后接入上位机所在的工业以太网;具有无线路由功能的KJ1206-F1无线监控分站只需接入电源就可以进行数据转发,无线数据路由可以达到八级。无线信号灯和无线发射器(机车卡)或无线车载分站是通过无线自组织网络和KJ1206-F1无线监控分站通信。车载分站或机车卡作为移动设备可以快速在KJ1206-F1无线分站间数据漫游。网络结构见下图: