大田洼乡交叉齿WPLF120-L3-140-S2-P2工程机械减速机
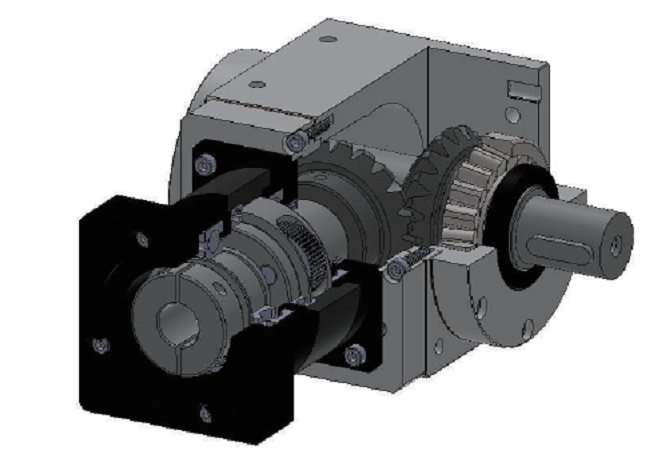
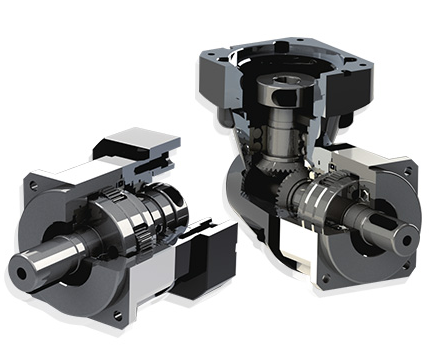
EAMON/伊明牌PF60系列精密行星減速機
精密直齒型、單懸臂結構;
方法蘭輸出、通孔連接;
安裝尺寸標準化、通用性強;
應用範圍廣、極具性價比;
適配電機功率:100W、400W、750W伺服電機,57、60、86步進電機等
適用於任何廠商所製造的驅動產品連接,如:松下、安川、三菱、富士、三洋、發那科、西門子、施耐德、科爾摩根、東元、台達、匯川、禾川、信捷等交流伺服電機、直流伺服電機、步進電機的減速傳動。

大田洼乡交叉齿WPLF120-L3-140-S2-P2工程机械减速机
伺服系统主要特点
1、的检测装置:以组成速度和位置闭环控制;
2、有多种反馈比较原理与方法:根据检测装置实现信息反馈的原理不同,伺服系统反馈比较的方法也不相同。常用的有脉冲比较、相位比较和幅值比较3种;
3、高性能的伺服电动机(简称伺服电机):用于和复杂型面加工的数控机床,伺服系统将经常处于频繁的启动和制动过程中。要求电机的输出力矩与转动惯量的比值大,以产生足够大的加速或制动力矩。要求伺服电机在低速时有足够大的输出力矩且运转平稳,以便在与机械运动部分连接中尽量减少中间环节;
4、宽调速范围的速度调节系统,即速度伺服系统:从系统的控制结构看,数控机床的位置闭环系统可看作是位置调节为外环、速度调节为内环的双闭环自动控制系统,其内部的实际工作过程是把位置控制输入转换成相应的速度给定信号后,再通过调速系统驱动伺服电机,实现实际位移。数控机床的主运动要求调速性能也比较高,因此要求伺服系统为高性能的宽调速系统。
大田洼乡交叉齿WPLF120-L3-140-S2-P2工程机械减速机
VRB115-3-K-3-110
VRB115-4-K-3-110
VRB115-5-K-3-110
VRB115-7-K-3-110
VRB115-10-K-3-110
VRB115-3-K-6-110
VRB115-4-K-6-110
VRB115-5-K-6-110
VRB115-7-K-6-110
VRB115-10-K-6-110
VRB115-12-K-6-110
VRB115-15-K-6-110
VRB115-16-K-6-110
VRB115-20-K-6-110
VRB115-25-K-6-110
VRB115-28-K-6-110
VRB115-30-K-6-110
VRB115-35-K-6-110
VRB115-40-K-6-110
VRB115-50-K-6-110
VRB115-70-K-6-110
VRB115-100-K-6-110
VRB115-12-K-8-110
VRB115-15-K-8-110
VRB115-16-K-8-110
VRB115-20-K-8-110
VRB115-25-K-8-110
VRB115-28-K-8-110
VRB115-30-K-8-110
VRB115-35-K-8-110
VRB115-40-K-8-110
VRB115-50-K-8-110
VRB115-70-K-8-110
VRB115-100-K-8-110
VRB115-3-K-3-130
VRB115-4-K-3-130
VRB115-5-K-3-130
VRB115-7-K-3-130
VRB115-10-K-3-130
VRB115-3-K-6-130
VRB115-4-K-6-130
VRB115-5-K-6-130
VRB115-7-K-6-130
VRB115-10-K-6-130
VRB115-12-K-6-130
VRB115-15-K-6-130
VRB115-16-K-6-130
VRB115-20-K-6-130
VRB115-25-K-6-130
VRB115-28-K-6-130
VRB115-30-K-6-130
VRB115-35-K-6-130
VRB115-40-K-6-130
VRB115-50-K-6-130
VRB115-70-K-6-130
VRB115-100-K-6-130
VRB115-12-K-8-130
VRB115-15-K-8-130
VRB115-16-K-8-130
VRB115-20-K-8-130
VRB115-25-K-8-130
VRB115-28-K-8-130
VRB115-30-K-8-130
VRB115-35-K-8-130
VRB115-40-K-8-130
VRB115-50-K-8-130
VRB115-70-K-8-130
VRB115-100-K-8-130
适合于工件磨损,加工超差修复。优点是修复后的铸件色差小,基本不产生内应力,无变形咬边,焊后修复量小,可以直接进行加工。缺点:焊补的速度很慢,通常2mm的孔需要3-5分钟,不适合大规模的修补;修补之后的硬度低,一般只能在HB15左右,对高硬度的铸件只能望洋兴叹;结合度低,由于补材是附着在工件上面,一般车床铣床之后容易脱落;焊后光洁度较低,对于加工之后有光洁度要求的铸件有心无力,由于其经常使用铜棒接触补材,难免出现铜屑或小的气孔麻点,只能修补一些加工要求不太高的铸件传统电火花堆焊修复机采用火花瞬间高频放电原理,将镍基焊材或者专用焊材离子态之后瞬间作用于工件表面,使焊材和工件以冶金方式熔合为一体。
大田洼乡交叉齿WPLF120-L3-140-S2-P2工程机械减速机






