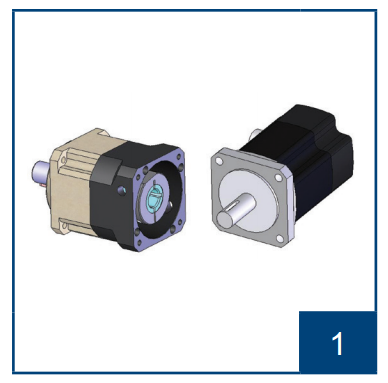
舜耕街道伊明牌TD-064-28-F3-19伺服蜗轮减速机
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。下面是小编给大家介绍的步进电机的动态指示术语:
1、步距角精度:步进电机每转过一个步距角的实际值与理论值的误差。用百分比表示:误差/步距角*。不同运行拍数其值不同,四拍运行时应在5%之内,八拍运行时应在15%以内。
2、失步:电机运转时运转的步数,不等于理论上的步数。称之为失步。
3、失调角:转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决的。
4、空载起动频率:电机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接起动的频率。
5、空载的运行频率:电机在某种驱动形式,电压及额定电流下,电机不带负载的转速频率。
舜耕街道伊明牌TD-064-28-F3-19伺服蜗轮减速机
JRF60-L1-3-P1
JRF60-L1-4-P1
JRF60-L1-5-P1
JRF60-L1-7-P1
JRF60-L1-10-P1
JRF60-L2-12-P1
JRF60-L2-15-P1
JRF60-L2-20-P1
JRF60-L2-25-P1
JRF60-L2-28-P1
JRF60-L2-40-P1
JRF60-L2-50-P1
JRF60-L2-70-P1
JRF60-L2-100-P1
JRF80-L1-3-P1
JRF80-L1-4-P1
JRF80-L1-5-P1
JRF80-L1-7-P1
JRF80-L1-10-P1
JRF80-L2-12-P1
JRF80-L2-15-P1
JRF80-L2-20-P1
JRF80-L2-25-P1
JRF80-L2-28-P1
JRF80-L2-40-P1
JRF80-L2-50-P1
JRF80-L2-70-P1
JRF80-L2-100-P1
舜耕街道伊明牌TD-064-28-F3-19伺服蜗轮减速机

舜耕街道伊明牌TD-064-28-F3-19伺服蜗轮减速机
因为,硬车削是通过使剪切部分的材料退火而形成切削的,若冷却率过高,就会减小由切削力而产生的这种效果,从而加大机械磨损,缩短刀具寿命。同时硬车削可省去与冷却液有关的装置,降低生产成本,简化生产系统,形成的切屑干净清洁,回收处理容易。设备投资少,适合柔性生产要求在生产率相同时,车床投资是磨床的1/3~1/2其辅助系统费用也低。对于小批量生产而言,硬车削不需特殊设备,而大批量加工高精度零件则需要刚性好、精度和重复精度高的数控机床。

舜耕街道伊明牌TD-064-28-F3-19伺服蜗轮减速机






