池上镇外观美NE120-80-S2-P1湖南伺服减速机
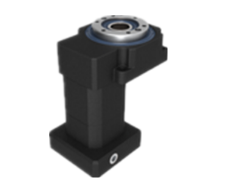
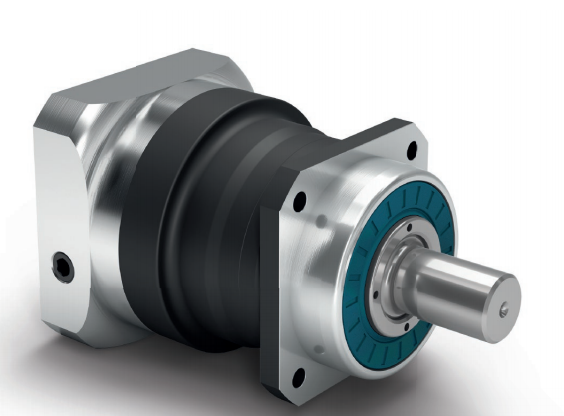
EAMON/伊明牌PRF系列直齒行星減速機
產品特點:
1、單懸臂結構,設計簡潔,性價比。
2、運行平穩,噪音低。
3、精度8-16弧分,可適應絕大部分場合。
規格範圍:
60-160
速比範圍:3-100
精度範圍:8-16弧分
池上镇外观美NE120-80-S2-P1湖南伺服减速机
细分和相数没关系。以1.8度为例,原来一个脉冲走1.8度,现在改为4细分,那么现在一个脉冲只能走1.8/4度了。细分越多,每个脉冲的步进长度越短。细分的多少可由驱动器设置。 控制步进电机转多少最主要你得通过步进电机步距角度计算出电机转一圈需要多少脉冲,比如步距角度为0.9°则电机转一圈需要给步进电机驱动器360/0.9=400个脉冲,转半圈就是200个脉冲。步进电机驱动器资料你先了解下! 步进电机转速则通过改变脉冲频率来控制,用plc的pwm输出控制是比较方便的,速度的快慢不影响步进电机的行程,行程多少取决于脉冲数量。 注意一点步进电机速度越快转矩越小,请根据你的应用调节速度以防失步,造成走位不准确。 步进电机是接收步进驱动器给过来的脉冲信号,比如两相的步进,AB相分别轮流输出正反脉冲(按一定顺序),步进电机就可以运行了,相当于一定的脉冲步进马达对应走一定旋转角度。而PLC也可以发出脉冲,但脉冲电压不够,所以需要把PLC输出的脉冲给步进驱动器放大来驱动步进驱动器,相当于PLC的脉冲就是指令脉冲。一般PLC驱动步进时候有两路信号,一路是角度脉冲,另外一路是方向脉冲,PLC里边一般配所谓位移指令,发梯形脉冲给步进驱动器,这样可以缓冲启动带来的力冲击。

池上镇外观美NE120-80-S2-P1湖南伺服减速机
PW090L1-P2-S2-L1
PW140-28-S2-P2
PW140-1-S2-P2
PW140-1-S2-P2
PW140-28-S2-P2
PW140-1S-S2-P2
PW140-1N-S2-P2
PW110-5-S2-P2
PW110-1S-S2-P2
PW110-1N-S2-P2
PW090L1-P2-S2-L1
PW140-10-P2-S2-35-79-114.3-200-M12
PW140-10-P2-S2
PW090-L2-50-K18-P2
ABF060-3-P1-S
ABF060-4-P1-S
ABF060-5-P1-S
ABF060-7-P1-S
ABF060-10-P1-S
ABF060-12-P1-S
ABF060-15-P1-S
ABF060-16-P1-S
ABF060-20-P1-S
ABF060-30-P1-S
ABF060-25-P1-S
ABF060-28-P1-S
ABF060-35-P1-S
ABF060-40-P1-S
ABF060-50-P1-S
ABF060-70-P1-S
ABF060-100-P1-S
换热器的日常维护日常操作应特别注意防止温度、压力的波动,首先应保证压力稳定,绝不允许超压运行。换热器的清洗换热设备经长时间运转后,由于介质的腐蚀、冲蚀、积垢、结焦等原因,使管子内外表面都有不同程度的结垢,甚至堵塞。所以在停工检修时必须进行清洗,常用的清洗(扫)方法有风扫、水洗、汽扫、化学洗清和机械清洗等。但这种传统的清洗方式如机械方法(刮、刷)、高压水、化学清洗(酸洗)等在对设备清洗时出现很多问题:不能清除水垢等沉积物,酸液对设备造成腐蚀形成漏洞,残留的酸对材质产生二次腐蚀或垢下腐蚀,最终导致更换设备,此外,清洗废液有毒,需要大量资金进行废水处理。
池上镇外观美NE120-80-S2-P1湖南伺服减速机






