南强乡AGV用HPF90-L2-100-S2-P2重庆精密行星减速器
EAMON/伊明牌AT/ATB轉向器
類別:行星減速機
軸形式:S1光軸/S2附鍵直軸
精度:標準(單節 : ≤6arcmin 雙節≤8armin 三節≤10armin)
率:單節 : ≧ 98%
額定輸出力矩範圍:12Nm~3200Nm
加速輸入轉速範圍:1700-7500rpm /3600rmp~8000rmp
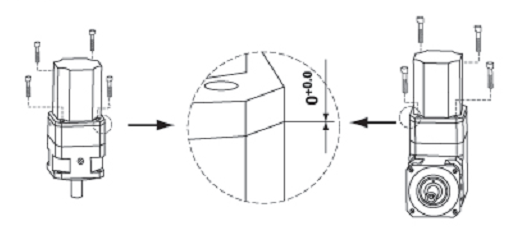
安裝方式:任意方向
型號示範
AT065/ATB065-L-001.5-S1 /馬達
AT210/ATB210-FL1-200-S1 /馬達
AT-不銹鋼 ,ATB-鑄鐵,各種輸出軸選擇高扭力,率,使用壽命長,低背隙,免維護,靈活的安裝尺寸
南强乡AGV用HPF90-L2-100-S2-P2重庆精密行星减速器
伺服电动机是伺服系统的执行机构,在小功率伺服系统中多采用永磁式伺服电动机,在大功率或较大功率的情况下也可采用电励磁的直流或交流伺服电机。 从电动机结构与数学模型看来,伺服电动机和调速电动机无本质上的区别,一般来说,伺服电动机的转动惯量小于调速电动机,低速和零速带载能力优于调速电动机。
控制器是伺服系统的关键所在,伺服系统的控制规律体现在控制器上,控制器应根据位置给定信号和反馈信号,经过必要的控制算法,产生功率驱动器的控制信号。与调速系统一样,伺服系统也经历了从模拟控制到数字控制的发展过程。
而可靠地发出速度给定信号并检测被控对象的实际速度是速度伺服系统工作良好的基本保证。位置传感器将具体的直线或转角位移转换成模拟的或数字的电量,再通过信号处理电路或相关的算法,形成与控制器输入量相匹配的速度信号,然后根据速度偏差信号实施控制,最终消除偏差。

南强乡AGV用HPF90-L2-100-S2-P2重庆精密行星减速器
VRB-180C-3-K5-48KA42
VRB-180C-4-K5-48KA42
VRB-180C-5-K5-48KA42
VRB-180C-6-K5-48KA42
VRB-180C-7-K5-48KA42
VRB-180C-8-K5-48KA42
VRB-180C-10-K5-48KA42
VRB-180C-15-K5-48KA42
VRB-180C-16-K5-48KA42
VRB-180C-20-K5-48KA42
VRB-180C-25-K5-48KA42
VRB-180C-28-K5-48KA42
VRB-180C-30-K5-48KA42
VRB-180C-35-K5-48KA42
VRB-180C-40-K5-48KA42
VRB-180C-50-K5-48KA42
VRB-180C-60-K5-48KA42
VRB-180C-70-K5-48KA42
VRB-180C-80-K5-48KA42
VRB-180C-100-K5-48KA42
VRB-180C-3-K5-19DD19
VRB-180C-4-K5-19DD19
VRB-180C-5-K5-19DD19
VRB-180C-6-K5-19DD19
VRB-180C-7-K5-19DD19
VRB-180C-8-K5-19DD19
VRB-180C-10-K5-19DD19
VRB-180C-15-K5-19DD19
VRB-180C-16-K5-19DD19
VRB-180C-20-K5-19DD19
VRB-180C-25-K5-19DD19
VRB-180C-28-K5-19DD19
VRB-180C-30-K5-19DD19
VRB-180C-35-K5-19DD19
VRB-180C-40-K5-19DD19
VRB-180C-50-K5-19DD19
VRB-180C-60-K5-19DD19
VRB-180C-70-K5-19DD19
VRB-180C-80-K5-19DD19
VRB-180C-100-K5-19DD19
以前使用平口钳,多工位平口钳和其它辅助工具费时费力地手动夹紧,现在AMF零点系统神奇地快速安全地全部解决。缩短的工装更换时间增加了机床的实际工作时间,原本准备用于购买新加工中心的资金被节省下来。但是零点系统在该工厂引入之初遇到很大的阻力,员工们对这套新的夹持系统报有很大的怀疑态度并坚决反对用它来替换原有的夹持系统。所幸公司管理层坚信零点系统的巨大潜力,与设计、计划、编程和生产等所有相关人员交流,使他们理解这种新夹具系统并最终消除了他们的疑虑。
南强乡AGV用HPF90-L2-100-S2-P2重庆精密行星减速器






