良田乡伊明科技PUL60-7-P2行星减速器选型手册
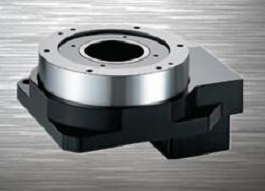
EAMON/伊明牌HAR系列直角行星減速機
規格:255mm
HAR轉角減速機90°直角輸出,高精密、率、大扭矩、傳動多樣性,安裝方便。
產品背隙:
P2:標準背隙 單段≤6弧分 雙段≤9弧分
P1:精密背隙 單段≤4弧分 雙段≤7弧分
P0:超精密背隙 單段≤2弧分 雙段≤4弧分
單段速比:4~20
雙段速比:20~200
效率:單段≧ 95% 雙段≧ 92%
良田乡伊明科技PUL60-7-P2行星减速器选型手册
为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。 在微分(D)控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。 自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。其原因是由于存在有较大惯性组件(环节)或有滞后(delay)组件,具有误差的作用, 其变化总是落后于误差的变化。解决的办法是使误差的作用的变化“超前”,即在误差接近零时,误差的作用就应该是零。这就是说,在控制器中仅引入 “比例”项往往是不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势,这样,具有比例+微分的控制器,就能 够提前使误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。所以对有较大惯性或滞后的被控对象,比例+微分(PD)控制器能改善系统在 调节过程中的动态特性。
直流电机以其价格低廉,控制方便的特性,得到了广泛的应用。旋转编码器精度高成本低,可作为的反馈传感器。采用PID闭环控制系统,可以并实时的控制和调整电机转速。
良田乡伊明科技PUL60-7-P2行星减速器选型手册
ZAB060-L1-3-P2-14-50-M4
ZAB060-L1-3-P2-14-50-M4
ZAB060-L1-5-P2-14-50-M4
ZAB060-L1-7-P2-14-50-M4
ZAB060-L1-10-P2-14-50-M4
ZAB060-L2-15-P2-14-50-M4
ZAB060-L2-16-P2-14-50-M4
ZAB060-L2-20-P2-14-50-M4
ZAB060-L2-25-P2-14-50-M4
ZAB060-L2-28-P2-14-50-M4
ZAB060-L2-30-P2-14-50-M4
ZAB060-L2-35-P2-14-50-M4
ZAB060-L2-40-P2-14-50-M4
ZAB060-L2-50-P2-14-50-M4
ZAB060-L2-70-P2-14-50-M4
ZAB060-L2-100-P2-14-50-M4
ZAB090-L1-3-P2-19-70-M6
ZAB090-L1-3-P2-19-70-M6
ZAB090-L1-5-P2-19-70-M6
ZAB090-L1-7-P2-19-70-M6
ZAB090-L1-10-P2-19-70-M6
ZAB090-L2-15-P2-19-70-M6
ZAB090-L2-16-P2-19-70-M6
ZAB090-L2-20-P2-19-70-M6
ZAB090-L2-25-P2-19-70-M6
ZAB090-L2-28-P2-19-70-M6
ZAB090-L2-30-P2-19-70-M6
ZAB090-L2-35-P2-19-70-M6
ZAB090-L2-40-P2-19-70-M6
ZAB090-L2-50-P2-19-70-M6
ZAB090-L2-70-P2-19-70-M6
ZAB090-L2-100-P2-19-70-M6

易损坏的任何突出的附件,如注油器和电位器的压力表,应从接头上拆下,与调节阀分开包装并一同运输。调节阀应用专用的支架固定,防止松动,要保证整体的垂直位置或水平位置。如果远距离运输,用牢固的木箱装运。保管调节阀时,不要把调节阀支承在敏感部位,阀门器、阀杆等处。运输和保管的环境条件应满足产品说明书要求。保管区域不要进行其他作业,无法避免时,必须注意不要碰到调节阀。场所还要避免受风沙、尘土、雨水等恶劣条件的影响,如果没有合适的场所,在贮藏前必须把调节阀装在防潮袋中,或放在类似的容器中。
良田乡伊明科技PUL60-7-P2行星减速器选型手册






