临城镇机床用STH120-10发那科减速器
EAMON/伊明牌PTN085 自身速比是1:5和1:18,需要其他速比可加行星減速機實現;
產品明細:
PTN085-5 PTN085-18 PTN085-20 PTN085-25 PTN085-35
PTN085-50 超過50比建議加大型號;
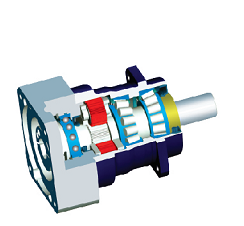
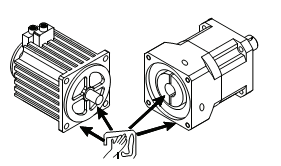
PTN85中空軸減速機選配電機:
1:可配任意品牌的伺服和步進電機;
2:電機功率適配100w,200w,400W和57步進電機
临城镇机床用STH120-10发那科减速器
伺服电动机是伺服系统的执行机构,在小功率伺服系统中多采用永磁式伺服电动机,在大功率或较大功率的情况下也可采用电励磁的直流或交流伺服电机。 从电动机结构与数学模型看来,伺服电动机和调速电动机无本质上的区别,一般来说,伺服电动机的转动惯量小于调速电动机,低速和零速带载能力优于调速电动机。
控制器是伺服系统的关键所在,伺服系统的控制规律体现在控制器上,控制器应根据位置给定信号和反馈信号,经过必要的控制算法,产生功率驱动器的控制信号。与调速系统一样,伺服系统也经历了从模拟控制到数字控制的发展过程。
而可靠地发出速度给定信号并检测被控对象的实际速度是速度伺服系统工作良好的基本保证。位置传感器将具体的直线或转角位移转换成模拟的或数字的电量,再通过信号处理电路或相关的算法,形成与控制器输入量相匹配的速度信号,然后根据速度偏差信号实施控制,最终消除偏差。
临城镇机床用STH120-10发那科减速器
KT170C-1
KT170C-2
KT170C-3
KT170C-4
KT170C-5
KT170C-6
KT170C-8
KT170C-10
KT170C-16
KT170C-20
KT170C-24
KT170C-30
KT170C-32
KT170C-40
KT170C-50
KT170C-60
KT170C-80
KT170C-120
KT210C-1
KT210C-2
KT210C-3
KT210C-4
KT210C-5
KT210C-6
KT210C-8
KT210C-10
KT210C-16
KT210C-20
KT210C-24
KT210C-30
KT210C-32
KT210C-40
KT210C-50
KT210C-60
KT210C-80
KT210C-120

事实上,一些公司提出的设计概念是在工具的外形上体现仿生学和工程学的效果。初期的设计往往是一张美术效果图。我们必须对自己现有的产品的外形进行设计,以满足这种需要,这样对外形提出了更高的要求。我们在设计一款新的工具时,首先得到的可能是一幅效果图或者是一些设计概念。我们必须结合自己现有的产品进行二维空间外形和内部结构设计,同时进行必要的结构、安全分析,得到二维的外形轮廓图。这个轮廓图应尽可能地反映一些关键截面的信息。
临城镇机床用STH120-10发那科减速器






