池河镇精密间隙AF115-L1-5-K5-22锯骨/酥皮机械行星减速机
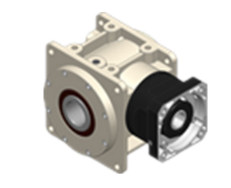
EAMON/伊明牌HAR系列直角行星減速機
規格:直角型
減速機型:HA(平行斜齒精密型)
減速機體型:R(90°直角輸出)
框號:47、64、90、100、140、200、255
減速比:單段4-20;雙段20-200
出力軸鍵槽:S(標準品)、T(特殊)
背隙等級:單段:P0≤1,P1≤3,P2≤5;雙段:P0≤3,P1≤5,P2≤7
峰值轉矩:14NM-2000NM
池河镇精密间隙AF115-L1-5-K5-22锯骨/酥皮机械行星减速机
3、如何控制伺服马达 标准的微型伺服马达有三条控制线,分别为:电源、地及控制。电源线与地线用于提供内部的直流马达及控制线路所需的能源,电压通常介于4V—6V之间,该电源应尽可能与处理系统的电源隔离(因为伺服马达会产生噪音)。甚至小伺服马达在重负载时也会拉低放大器的电压,所以整个系统的电源供应的比例必须合理。 4、伺服马达的电源引线 电源引线有三条,如图中所示。伺服马达三条线中红色的线是控制线,接到控制芯片上。中间的是SERVO工作电源线,一般工作电源是5V。 第三条是地线 5、伺服马达的运动速度 伺服马达的瞬时运动速度是由其内部的直流马达和变速齿轮组的配合决定的,在恒定的电压驱动下,其数值。但其平均运动速度可通过分段停顿的控制方式来改变,例如,我们可把动作幅度为90o的转动细分为128个停顿点,通过控制每个停顿点的时间长短来实现0o—90o变化的平均速度。对于多数伺服马达来说,速度的单位由“度数/秒”来决定。
池河镇精密间隙AF115-L1-5-K5-22锯骨/酥皮机械行星减速机
KPLB140-L1-3-P1
KPLB140-L1-4-P1
KPLB140-L1-5-P1
KPLB140-L1-6-P1
KPLB140-L1-7-P1
KPLB140-L1-8-P1
KPLB140-L1-10-P1
KPLB140-L2-15-P1
KPLB140-L2-20-P1
KPLB140-L2-25-P1
KPLB140-L2-30-P1
KPLB140-L2-35-P1
KPLB140-L2-40-P1
KPLB140-L2-50-P1
KPLB140-L2-60-P1
KPLB140-L2-70-P1
KPLB140-L2-80-P1
KPLB140-L2-100-P1
KPLB180-L1-3-P1
KPLB180-L1-4-P1
KPLB180-L1-5-P1
KPLB180-L1-6-P1
KPLB180-L1-7-P1
KPLB180-L1-8-P1
KPLB180-L1-10-P1
KPLB180-L2-15-P1
KPLB180-L2-20-P1
KPLB180-L2-25-P1
KPLB180-L2-30-P1
KPLB180-L2-35-P1
KPLB180-L2-40-P1
KPLB180-L2-50-P1
KPLB180-L2-60-P1
KPLB180-L2-70-P1
KPLB180-L2-80-P1
KPLB180-L2-100-P1
先使用红鼻跟数码管地引出端碰触,此时黑笔则依次测量其他引出端,如果测试结果为各段全部发光正常,则数码管完好;如果其中一段不发光,则数码管已损坏。电位器标称阻值的测量在判断电位器的时候,应该先测量电位器的标称阻值。怎么测量电位器的标称阻值?调整万用表的电阻档位,将2端作为移动触点,欧姆档如果指针不动、阻值不动,则电位器损坏。随后测量电位器活动臂跟电阻片的接触是否存在问题。可以使用万用表欧姆档的2或者3端将电阻器转轴逆时针旋转到靠近关的位置,也就是电阻的地方,再慢慢将转轴按顺时针方向旋转,电阻慢慢变大,当转轴到达极限位置时,此时电阻值应跟电位器的标称值相近。
池河镇精密间隙AF115-L1-5-K5-22锯骨/酥皮机械行星减速机






