相桥街道精密型ADR160-350-S1-P2行星减速机太阳轮和齿圈
EAMON/伊明牌HLR行星減速機產品優點:
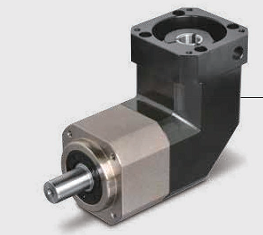
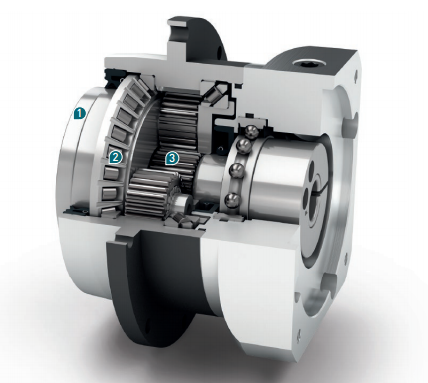
1:本行星減速機為直齒直角減速箱,圓法蘭輸出,輸出軸採用雙軸承支撐,承載扭矩大;
2:性價比高,輕巧,安裝方便;
3:齒輪淬火硬度達62度,齒面磨齒;
4:表面採用烤漆處理,保證外觀不變色,不生鏽;
5:可配任意品牌的伺服和步進電機(如1.5KW富士伺服電機減速機);
6: 回程間隙≤10弧分;
7: 防護等級:IP65;
8: 終身免維護,高速行星減速機;

相桥街道精密型ADR160-350-S1-P2行星减速机太阳轮和齿圈
伺服系统结构装置
伺服系统一般具备三大环节:伺服电机、伺服驱动器和实施控制的上位机,上位机大都用。或单片机
伺服电机是这个系统的执行元件,伺服系统靠脉冲来,而位置控制的基本点是上位机依据被控对象的具体控制要求,编制程序;伺服驱动器执行上位机程序,输出脉冲。这样,带有特定程序规则的脉冲电源让伺服电机驱使机械部件实现位移或转角,完成工序作业任务。可见无论控制对象的要求千变万化,其准确的位置必然与脉冲的数量和每单位脉冲期间机械部件的移动量这样两个要素密切相关。
就机械构成而言,伺服电机输出轴与负载输入之间通常都有减速装置,它反映了伺服电机与负载输入之间转速的对应(倍率)关系,俗称速比。由于机械结构的特点,这样的机械传动系统一旦确立,那么减速装置的速比就是固定的,如果需要调整,就意味可能废除原有硬件,重新制作安装,显然不是很方便。能不能找到更方便且有效的途径,让机械系统的速度变化在一定的范围内可调整、设定.
相桥街道精密型ADR160-350-S1-P2行星减速机太阳轮和齿圈
WVRB220-003-K-P2
WVRB220-004-K-P2
WVRB220-005-K-P2
WVRB220-006-K-P2
WVRB220-007-K-P2
WVRB220-008-K-P2
WVRB220-010-K-P2
WVRB220-015-K-P2
WVRB220-020-K-P2
WVRB220-025-K-P2
WVRB220-030-K-P2
WVRB220-035-K-P2
WVRB220-040-K-P2
WVRB220-050-K-P2
WVRB220-060-K-P2
WVRB220-070-K-P2
WVRB220-080-K-P2
WVRB220-100-K-P2
EVB-060-3-K7-19DB19
EVB-060-4-K7-19DB19
EVB-060-5-K7-19DB19
EVB-060-6-K7-19DB19
EVB-060-7-K7-19DB19
EVB-060-8-K7-19DB19
EVB-060-9-K7-19DB19
EVB-060-10-K7-19DB19
EVB-060-15-K7-19DB19
EVB-060-16-K7-19DB19
EVB-060-20-K7-19DB19
EVB-060-25-K7-19DB19
EVB-060-28-K7-19DB19
EVB-060-30-K7-19DB19
EVB-060-35-K7-19DB19
EVB-060-40-K7-19DB19
EVB-060-45-K7-19DB19
EVB-060-50-K7-19DB19
EVB-060-60-K7-19DB19
EVB-060-70-K7-19DB19
EVB-060-80-K7-19DB19
EVB-060-90-K7-19DB19
EVB-060-100-K7-19DB19
但由于质量不能直接测量,质量是利用质量在地球重力场中的力效应(重量)来测量的,所以从测量技术而论它们彼此是同类的。负荷特性额定量程:一只传感器的额定量程是指在设计此传感器在设计此传感器时,是以多大的力值来计算的。但实际使用时,一般只用额定量程的2/3~1/3甚至只有1/6。(原因见下面分析)。允许使用负荷(或称安全超载):允许在一定范围内超负荷工作。一般为12%~15%;极限负荷(或称极限超载):意即当工作超过此值时,传感器将会受到损坏。
相桥街道精密型ADR160-350-S1-P2行星减速机太阳轮和齿圈






