无极镇TMK-180-L1-R007-P1免维护伺服减速器
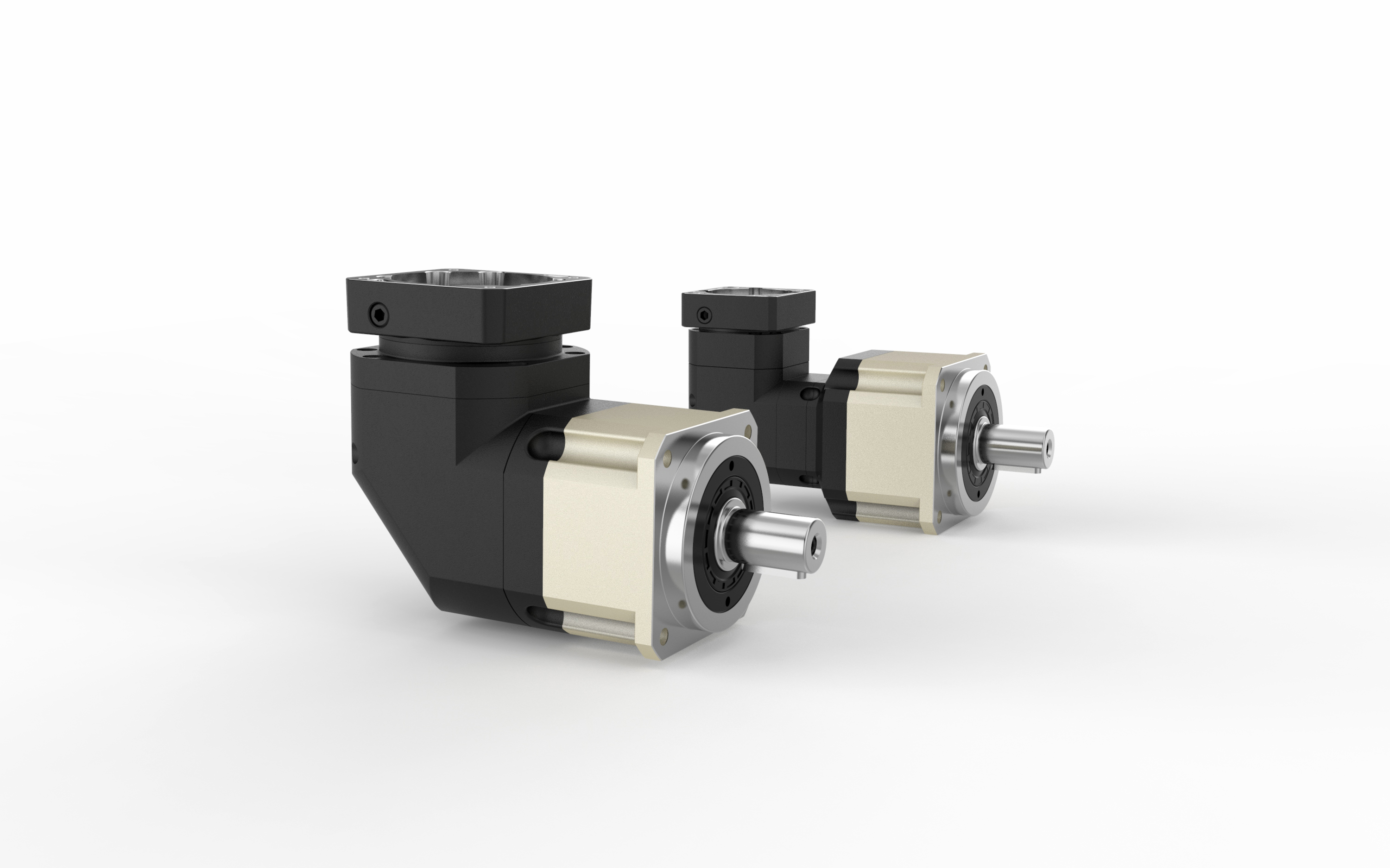
EAMON/伊明牌ZPEK90系列中空軸直角行星減速機
適配電機功率:200W、400W、750W、1000W伺服電機等
適用於任何廠商所製造的驅動產品連接,如:松下、安川、三菱、富士、三洋、發那科、西門子、施耐德、科爾摩根、東元、台達、匯川、禾川、信捷等交流伺服電機、直流伺服電機、步進電機的減速傳動。

无极镇TMK-180-L1-R007-P1免维护伺服减速器
2.开环控制和闭环控制
数控机床伺服驱动系统的基本组成如图所示。数控机床的伺服驱动系统按有无反馈检测单元分为开环和闭环两种类型(见数控机床伺服驱动系统分类),这两种类型的伺服驱动系统的基本组成不完全相同。但不管是哪种类型,执行元件及其驱动控制单元都必不可少。驱动控制单元的作用是将进给指令转化为驱动执行元件所需要的信号形式,执行元件则将该信号转化为相应的机械位移。
开环伺服驱动系统由驱动控制单元、执行元件和机床组成。通常,执行元件选用步进电机。执行元件对系统的特性具有重要影响。
闭环伺服驱动系统由执行元件、驱动控制单元、机床,以及反馈检测单元、比较控制环节组成。反馈检测单元将工作台的实际位置检测后反馈给比较控制环节,比较控制环节将指令信号和反馈信号进行比较,以两者的差值作为伺服系统的跟随误差经驱动控制单元,驱动和控制执行元件带动工作台运动。
在CNC系统中,由于计算机的引入,比较控制环节的功能由软件完成,从而导致系统结构的一些改变,但基本上还是由执行元件、反馈检测单元、比较控制环节、驱动控制单元和机床组成。
无极镇TMK-180-L1-R007-P1免维护伺服减速器
VRB-090B-3-K5-S8ZH8
VRB-090B-4-K5-S8ZH8
VRB-090B-5-K5-S8ZH8
VRB-090B-6-K5-S8ZH8
VRB-090B-7-K5-S8ZH8
VRB-090B-8-K5-S8ZH8
VRB-090B-9-K5-S8ZH8
VRB-090B-10-K5-S8ZH8
VRB-090B-15-K5-S8ZH8
VRB-090B-16-K5-S8ZH8
VRB-090B-20-K5-S8ZH8
VRB-090B-25-K5-S8ZH8
VRB-090B-28-K5-S8ZH8
VRB-090B-30-K5-S8ZH8
VRB-090B-35-K5-S8ZH8
VRB-090B-40-K5-S8ZH8
VRB-090B-45-K5-S8ZH8
VRB-090B-50-K5-S8ZH8
VRB-090B-60-K5-S8ZH8
VRB-090B-70-K5-S8ZH8
VRB-090B-80-K5-S8ZH8
VRB-090B-90-K5-S8ZH8
VRB-090B-100-K5-S8ZH8
VRB-090B-3-K5-19DD19
VRB-090B-4-K5-19DD19
VRB-090B-5-K5-19DD19
VRB-090B-6-K5-19DD19
VRB-090B-7-K5-19DD19
VRB-090B-8-K5-19DD19
VRB-090B-9-K5-19DD19
VRB-090B-10-K5-19DD19
VRB-090B-15-K5-19DD19
VRB-090B-16-K5-19DD19
VRB-090B-20-K5-19DD19
VRB-090B-25-K5-19DD19
VRB-090B-28-K5-19DD19
VRB-090B-30-K5-19DD19
VRB-090B-35-K5-19DD19
VRB-090B-40-K5-19DD19
VRB-090B-45-K5-19DD19
VRB-090B-50-K5-19DD19
VRB-090B-60-K5-19DD19
VRB-090B-70-K5-19DD19
VRB-090B-80-K5-19DD19
VRB-090B-90-K5-19DD19
VRB-090B-100-K5-19DD19
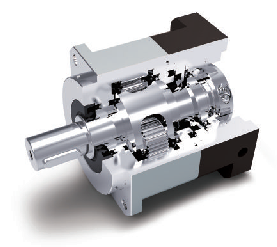
拆卸原则内容拆卸前应弄清轴承与关联件的关系仔细观察轴承所的的位置与关联件的关系,分析安装的过程和方法,然后制定出拆卸的方法和程序能不拆卸的尽量不拆分离的轴承,其内、外圈通常都是采用过盈配合的,为确保其配合精度,缩短修理工期,能不拆卸的可尽量不拆采用科学的拆卸方法拆卸轴颈上的轴承,应施力于内圈,拆卸轴承座上的轴承应施力于外圈拆卸轴承的内圈或外圈时,用力应平衡、均匀,不得歪斜,以防卡死拆卸轴承时,不得用易破裂的物件敲击,必须用压卸或采用专用的拆卸工具拆卸,个别情况也可用铜棒或其它软金属衬垫敲击。
无极镇TMK-180-L1-R007-P1免维护伺服减速器






