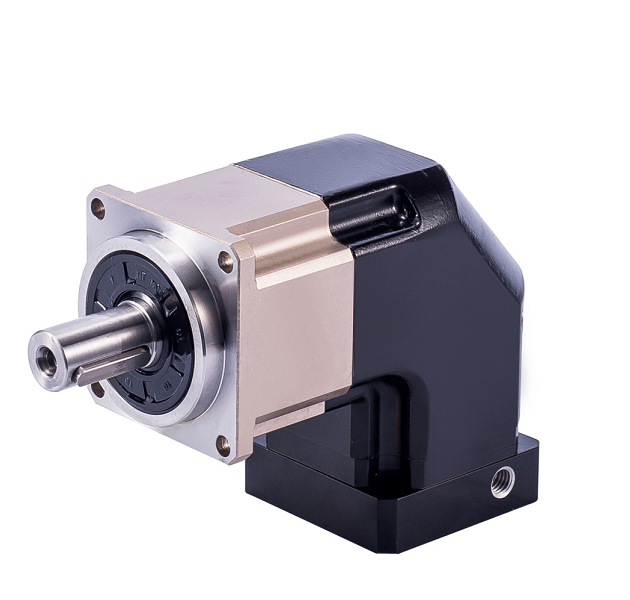
安平镇斜齿伺服齿轮减速器IB142-3-P2-S2随心定制
EAMON/伊明牌FAB/FABR系列
簡 介:FAB為同軸型斜齒精密行星 / FABR為直角型斜齒精密行星
性能特點:
1.低噪音:低於65dB。
2.低背隙:單級可達1弧分以內,雙級可達3弧分以內。
3.率:單級可在95%以上,雙級可在92%以上。
4.高輸入轉速:可達8000RPM.
5.高扭矩:比一般標準的行星減速機扭矩高。
6.高穩定性:採用高強度合金鋼材,整顆齒輪經硬化處理,非只有表面硬化,確保使用壽命及長期使用仍保持初始的精密度。
7.高減速比:採用模組化設計,行星齒輪箱可互相連接,速比可達1/100以上。
應用領域:主要應用在汽車製造、自動化設備、紡織印刷、數控機床、機床改造、機器人、包裝機械、倉儲物流等行業。
技術參數:
ratio/減速比:i=3:1~100:1。
output torque/輸出轉矩:up to 2000N.m。
frame size/機座型號:
FAB042 / 060 / 090 / 115 / 142 / 180 / 220
FABR042 / 060 / 090 / 115 / 142 / 180 / 220
安平镇斜齿伺服齿轮减速器IB142-3-P2-S2随心定制
3、 速度模式:通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环PID控制时速度模式也可以进行,但必须把电机的位置信号或直接负载的位置信号给上位反馈以做运算用。位置模式也支持直接负载外环检测位置信号,此时的电机轴端的编码器只检测电机转速,位置信号就由直接的最终负载端的检测装置来提供了,这样的优点在于可以减少中间传动过程中的误差,增加了整个系统的精度。 如果对位置和速度有一定的精度要求,而对实时转矩不是很关心,用转矩模式不太方便,用速度或位置模式比较好。如果上位技术相对于控制器有比较好的闭环控制功能,用速度控制效果会好一点。如果本身要求不是很高,或者,基本没有实时性的要求,用位置控制方式对上位控制器没有很高的要求。 就伺服驱动器的响应速度来看,转矩模式运算量,驱动器对控制信号的响应最快;位置模式运算量,驱动器对控制信号的响应最慢。 对运动中的动态性能有比较高的要求时,需要实时对电机进行调整。那么如果控制器本身的运算速度很慢(比如PLC,或低端运动控制器),就用位置方式控制。如果控制器运算速度比较快,可以用速度方式,把位置环从驱动器移到控制器上,减少驱动器的工作量,提率(比如大部分中高端运动控制器);如果有更好的上位控制器,还可以用转矩方式控制,把速度环也从驱动器上移开,这一般只是高端专用控制器才能这么干,而且,这时完全不需要使用伺服电机。
安平镇斜齿伺服齿轮减速器IB142-3-P2-S2随心定制
VRB-060-3-K5-14BM11
VRB-060-4-K5-14BM11
VRB-060-5-K5-14BM11
VRB-060-6-K5-14BM11
VRB-060-7-K5-14BM11
VRB-060-8-K5-14BM11
VRB-060-9-K5-14BM11
VRB-060-10-K5-14BM11
VRB-060-15-K5-14BM11
VRB-060-16-K5-14BM11
VRB-060-20-K5-14BM11
VRB-060-25-K5-14BM11
VRB-060-28-K5-14BM11
VRB-060-30-K5-14BM11
VRB-060-35-K5-14BM11
VRB-060-40-K5-14BM11
VRB-060-45-K5-14BM11
VRB-060-50-K5-14BM11
VRB-060-60-K5-14BM11
VRB-060-70-K5-14BM11
VRB-060-80-K5-14BM11
VRB-060-90-K5-14BM11
VRB-060-100-K5-14BM11
VRB-060-3-K5-14BJ11
VRB-060-4-K5-14BJ11
VRB-060-5-K5-14BJ11
VRB-060-6-K5-14BJ11
VRB-060-7-K5-14BJ11
VRB-060-8-K5-14BJ11
VRB-060-9-K5-14BJ11
VRB-060-10-K5-14BJ11
VRB-060-15-K5-14BJ11
VRB-060-16-K5-14BJ11
VRB-060-20-K5-14BJ11
VRB-060-25-K5-14BJ11
VRB-060-28-K5-14BJ11
VRB-060-30-K5-14BJ11
VRB-060-35-K5-14BJ11
VRB-060-40-K5-14BJ11
VRB-060-45-K5-14BJ11
VRB-060-50-K5-14BJ11
VRB-060-60-K5-14BJ11
VRB-060-70-K5-14BJ11
VRB-060-80-K5-14BJ11
VRB-060-90-K5-14BJ11
VRB-060-100-K5-14BJ11

积水筒水位不可过高,使水溢出积水筒或过低使湿球测试布吸水不正常,影响湿球的准确性水位大约保持六分满即可。积水筒水位之调整,可调整积水盒的高低。恒温恒湿试验箱湿球水位之检查与调整积水筒水位不可过高,使水溢出积水筒或过低使湿球测试布吸水不正常,影响湿球的准确性水位大约保持六分满即可。积水筒水位之调整,可调整积水盒的高低。恒温恒湿试验箱湿球测试布之更换当测试布表面不干净或变硬,或于做完温度控制后,继续做温湿球度控制前都必须更换测试布。
安平镇斜齿伺服齿轮减速器IB142-3-P2-S2随心定制






