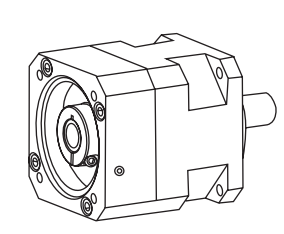
庐镇乡伊明生产NMRV130-40圆法兰
2.转子的平均速度高于定子磁场的平均旋转速度 转子的平均速度高于定子磁场的平均旋转速度,这时定子通电励磁的时间较长,大于转子步进一步所需的时间,则转子在步进过程中获得了过多的能量,使得步进电动机产生的输出转矩增大,从而使电动机越步。当用步进电动机驱动那些使负载上、下动作的机构时,更易产生越步现象,这是因为负载向下运动时,电动机所需的转矩减小。解决方法:减小步进 电动机的驱动电流,以便降低步进电动机的输出转矩。 3.步进电动机及所带负载存在惯性 由于步进电动机自身及所带负载存在惯性,使得电动机在工作过程中不能立即起动和停止,而是在起动时出现丢步,在停止时发生越步。解决方法:通过一个加速和减速过程,即以较低的速度起动,而后逐渐加速到某一速度运行,再逐渐减速直至停止。进行合理、平滑 的加减速控制是保证步进驱动系统可靠、、运行的关键。 4.步进电动机产生共振 共振也是引起失步的一个原因。步进电动机处于连续运行状态时,如果控制脉冲的频率等于步进电动机的固有频率,将产生共振。在一个控制脉冲周期内,振动得不到充分衰减,下一个脉冲就来到,因而在共振频率附近动态误差并会导致步进电动机失步。解决方法:适当减小步进电动机的驱动电流;采用细分驱动方法;采用阻尼方法,包括机械阻尼法。以 上方法都能有效消除电动机振荡,避免失步现象发生。
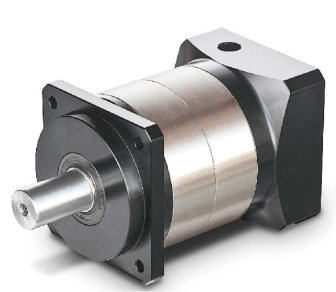
庐镇乡伊明生产NMRV130-40圆法兰
SF60-03-S2-P2-L1
SF60-04-S2-P2-L1
SF60-05-S2-P2-L1
SF60-07-S2-P2-L1
SF60-08-S2-P2-L1
SF60-10-S2-P2-L1
SF60-12-S2-P2-L2
SF60-15-S2-P2-L2
SF60-20-S2-P2-L2
SF60-25-S2-P2-L2
SF60-30-S2-P2-L2
SF60-35-S2-P2-L2
SF60-40-S2-P2-L2
SF60-50-S2-P2-L2
SF60-70-S2-P2-L2
SF60-100-S2-P2-L2
SF080-03-S2-P2-L1
SF080-04-S2-P2-L1
SF080-05-S2-P2-L1
SF080-07-S2-P2-L1
SF080-08-S2-P2-L1
SF080-10-S2-P2-L1
SF080-12-S2-P2-L2
SF080-15-S2-P2-L2
SF080-20-S2-P2-L2
SF080-25-S2-P2-L2
SF080-30-S2-P2-L2
SF080-35-S2-P2-L2
SF080-40-S2-P2-L2
SF080-50-S2-P2-L2
SF080-70-S2-P2-L2
SF080-100-S2-P2-L2
庐镇乡伊明生产NMRV130-40圆法兰

庐镇乡伊明生产NMRV130-40圆法兰
海水淡化和海水利用工程,就为重防腐涂料和应用开辟了一个崭新的领域和市场。在盛产石油的中东,前临大海背靠沙漠,是典型的缺水地区,要解决水源,主要靠海水淡化技术。开采和石油用的工业用水,也得求助于海水利用的水处理工程。据统计,1975年全世界日产淡水2万m3,1994年就达到2万m3,2年就已增长了1倍。美国、日本、以色列的海水淡化和海水利用设施,都必须面对海水的腐蚀。由于海水腐蚀的特殊性,对用于这些设施的重防腐涂料提出了更严格的要求。
庐镇乡伊明生产NMRV130-40圆法兰






