西河庄乡ABR060-L1-004-S2-P2机器人伺服行星减速器
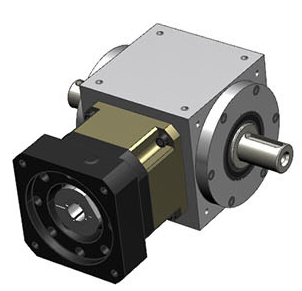
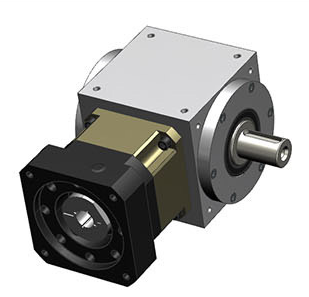
EAMON/伊明牌FAD/FADR系列
簡 介:FAD為同軸型盤式精密行星 / FADR為直角型盤式精密行星
性能特點:
1.低噪音:低於65dB。
2.低背隙:單級可達1弧分以內,雙級可達3弧分以內。
3.率:單級可在95%以上,雙級可在92%以上。
4.高輸入轉速:可達8000RPM.
5.高扭矩:比一般標準的行星減速機扭矩高。
6.高穩定性:採用高強度合金鋼材,整顆齒輪經硬化處理,非只有表面硬化,確保使用壽命及長期使用仍保持初始的精密度。
7.高減速比:採用模組化設計,行星齒輪箱可互相連接,速比可達1/200以上。
應用領域:主要應用在汽車製造、自動化設備、紡織印刷、數控機床、機床改造、機器人、激光切割、包裝機械、倉儲物流等行業。
技術參數:
ratio/減速比:i=3:1~200:1。
output torque/輸出轉矩:up to 2000N.m。
frame size/機座型號:
FAD047 / 064 / 090 / 110 / 140 / 200 / 255
FADR047 / 064 / 090 / 110 / 140 / 200 / 255
西河庄乡ABR060-L1-004-S2-P2机器人伺服行星减速器
电动机绝缘电阻测量步骤如下:
1、将电动机接线盒内6个端头的联片拆开。
2、把兆欧放平,先不接线,摇动兆欧表,表针应指向“∞”处,再将表上有“L”(线路)和“E”(接地)的两接线柱用带线的试夹短接,慢慢摇动手柄,表针应指向“0”处。
3、测量电动机三相绕组之间的电阻。将两测试夹分别接到任意两相绕组的任一端头上,平放摇表,以每分钟120转的匀速摇动兆欧表一分钟后,读取表针稳定的指示值。
4、用同样方法,依次测量每相绕相与机壳的绝缘电阻值。但应注意,表上标有“E”。
西河庄乡ABR060-L1-004-S2-P2机器人伺服行星减速器
MAH140-L1-3-P2-35-114.3-M12
MAH140-L1-4-P2-35-114.3-M12
MAH140-L1-5-P2-35-114.3-M12
MAH140-L1-7-P2-35-114.3-M12
MAH140-L1-10-P2-35-114.3-M12
MAH140-L2-15-P2-35-114.3-M12
MAH140-L2-16-P2-35-114.3-M12
MAH140-L2-20-P2-35-114.3-M12
MAH140-L2-25-P2-35-114.3-M12
MAH140-L2-28-P2-35-114.3-M12
MAH140-L2-30-P2-35-114.3-M12
MAH140-L2-35-P2-35-114.3-M12
MAH140-L2-40-P2-35-114.3-M12
MAH140-L2-50-P2-35-114.3-M12
MAH140-L2-70-P2-35-114.3-M12
MAH140-L2-100-P2-35-114.3-M12
NE060-L1-3-P2-14-50-M4
NE060-L1-4-P2-14-50-M4
NE060-L1-5-P2-14-50-M4
NE060-L1-7-P2-14-50-M4
NE060-L1-10-P2-14-50-M4
NE060-L2-16-P2-14-50-M4
NE060-L2-20-P2-14-50-M4
NE060-L2-25-P2-14-50-M4
NE060-L2-28-P2-14-50-M4
NE060-L2-35-P2-14-50-M4
NE060-L2-40-P2-14-50-M4
NE060-L2-50-P2-14-50-M4
NE060-L2-70-P2-14-50-M4
NE060-L3-64-P2-14-50-M4
NE060-L3-80-P2-14-50-M4
NE060-L3-100-P2-14-50-M4
NE060-L3-125-P2-14-50-M4
NE060-L3-140-P2-14-50-M4
NE060-L3-175-P2-14-50-M4
NE060-L3-200-P2-14-50-M4
NE060-L3-250-P2-14-50-M4
NE060-L3-280-P2-14-50-M4
NE060-L3-350-P2-14-50-M4
半圆头铆钉主要用于随较大横向载荷的铆接场合,应用极广。平锥头铆钉由于钉头肥大,能耐腐蚀,常用于船壳、锅炉水箱等腐蚀强烈的铆接场合。沉头、12沉头铆钉主要用于表面须平滑,随载荷不大的铆接场合。半沉头、12半沉头铆钉主要用于表面须平滑,随载荷不大的铆接场合。扁平头、扁圆头铆钉主要用于金属薄板或皮革、帆布、木料等非金属材料的铆接场合。大扁平头铆钉主要用于非金属材料的铆接场合。半空心铆钉主要用于随载荷不大的铆接场合。
西河庄乡ABR060-L1-004-S2-P2机器人伺服行星减速器






