PS90L1-7-P2-S1-19-35-70-90-M6微型行星减速器
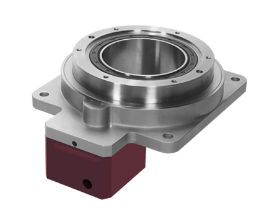
EAMON/伊明牌HA系列盤式行星減速機
規格:標準型
減速機型:HA(平行斜齒精密型)
框號:47、64、90、100、140、200、255
減速比:單段=4-10;雙段=20-91
出力軸鍵槽:S(標準品)、T(特殊)
背隙等級:單段:P0≤1,P1≤3,P2≤5;雙段:P0≤3,P1≤5,P2≤7
峰值轉矩:14NM-2000NM
PS90L1-7-P2-S1-19-35-70-90-M6微型行星减速器
伺服电机的工作原理
1、伺服系统(servomechanism)是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。伺服位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,调速范围宽,控制容易,需要维护,但维护不方便(换碳刷),产生电磁干扰,对环境有要求。因此它可以用于对成本敏感的普通工业和民用场合。
无刷电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。控制复杂,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。电机免维护,效率很高,运行温度低,电磁辐射很小,长寿命,可用于各种环境。
PS90L1-7-P2-S1-19-35-70-90-M6微型行星减速器
TSE060L1-3-5-22
TSE060L1-4-5-22
TSE060L1-5-5-22
TSE060L1-7-5-22
TSE060L1-10-5-22
TSE060L2-12-5-22
TSE060L2-15-5-22
TSE060L2-20-5-22
TSE060L2-25-5-22
TSE060L2-30-5-22
TSE060L2-35-5-22
TSE060L2-40-5-22
TSE060L2-50-5-22
TSE060L2-70-5-22
TSE060L2-100-5-22
TSE060L1-3-6.35-38.1
TSE060L1-4-6.35-38.1
TSE060L1-5-6.35-38.1
TSE060L1-7-6.35-38.1
TSE060L1-10-6.35-38.1
TSE060L2-12-6.35-38.1
TSE060L2-15-6.35-38.1
TSE060L2-20-6.35-38.1
TSE060L2-25-6.35-38.1
TSE060L2-30-6.35-38.1
TSE060L2-35-6.35-38.1
TSE060L2-40-6.35-38.1
TSE060L2-50-6.35-38.1
TSE060L2-70-6.35-38.1
TSE060L2-100-6.35-38.1
圆度仪,通常是采用半径测量法,通过旋转工作台带动工件旋转。圆度仪旋转轴是采用高精度气浮主轴作为测量基准;圆度仪电器部分由高级计算机及精密圆光栅传感器、精密电感位移传感器组成,圆光栅传感器、精密电感位移传感器计量角度、径向位移量,保证测量工件的角位移、径向值的度;圆度仪的测量能力:各种环形工件的圆度、圆柱度、同轴度、同心度、平面度、平行度、垂直度、径向偏差、厚度偏差、径向跳动、径向全跳动、直径测量、直线度、倾斜度、锥度、直径轮廓公差、直线轮廓公差等等。
PS90L1-7-P2-S1-19-35-70-90-M6微型行星减速器






