板桥镇小型伺服齿轮减速器KLB-090-002产品描述
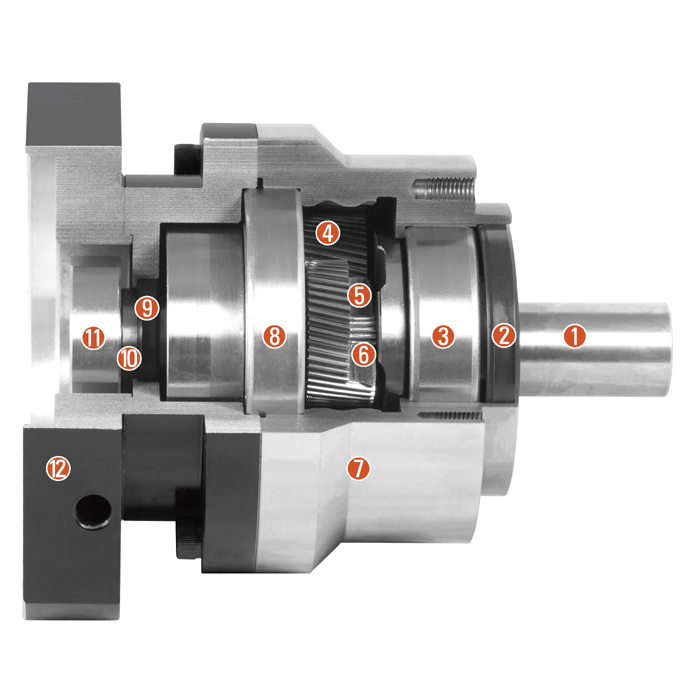
EAMON/伊明牌WVRBR系列行星減速機
產品參數
率:傳動效率高達97%以上
低噪音:設計精巧,精密製造,噪音低於63dB(A)
高輸入轉速:輸入轉速可達10000 rpm
低背隙:單節低於2弧分,雙節低於3弧分
高減速比:模塊化設計,行星齒輪箱可相互連接速比高
板桥镇小型伺服齿轮减速器KLB-090-002产品描述
6、使用伺服马达的注意事项 除非你使用的是数码式的伺服马达,否则以上的伺服马达输出臂位置只是一个不准确的大约数。 普通的模拟微型伺服马达不是一个的器件,即使是使用同一品牌型号的微型伺服马达产品,他们之间的差别也是非常大的,在同一脉冲驱动时,不同的伺服马达存在±10o的偏差也是正常的。 正因上述的原因,不推荐使用小于1ms及大于2ms的脉冲作为驱动信号,实际上,伺服马达的最初设计表也只是在±45o的范围。而且,超出此范围时,脉冲宽度转动角度之间的线性关系也会变差。 要特别注意,绝不可加载让伺服马达输出位置超过±90o的脉冲信号,否则会损坏伺服马达的输出限位机构或齿轮组等机械部件。 由于伺服马达的输出位置角度与控制信号脉冲宽度没有明显统一的标准,而且其行程的总量对于不同的厂家来说也有很大差别,所以控制软件必须具备有依据不同伺服马达进行单独设置的功能。

板桥镇小型伺服齿轮减速器KLB-090-002产品描述
FXPF120-3-S2-P2
FXPF120-4-S2-P2
FXPF120-5-S2-P2
FXPF120-7-S2-P2
FXPF120-10-S2-P2
FXPF120-12-S2-P2
FXPF120-15-S2-P2
FXPF120-16-S2-P2
FXPF120-20-S2-P2
FXPF120-25-S2-P2
FXPF120-28-S2-P2
FXPF120-35-S2-P2
FXPF120-32-S2-P2
FXPF120-30-S2-P2
FXPF120-40-S2-P2
FXPF120-50-S2-P2
FXPF120-70-S2-P2
FXPF120-60-S2-P2
FXPF120-64-S2-P2
FXPF120-75-S2-P2
FXPF120-80-S2-P2
FXPF120-100-S2-P2
FXPF120-125-S2-P2
FXPF120-140-S2-P2
FXPF120-175-S2-P2
FXPF120-200-S2-P2
FXPF120-250-S2-P2
FXPF120-300-S2-P2
FXPF160-3-S2-P2
FXPF160-4-S2-P2
FXPF160-5-S2-P2
FXPF160-8-S2-P2
FXPF160-12-S2-P2
FXPF160-15-S2-P2
FXPF160-16-S2-P2
FXPF160-20-S2-P2
FXPF160-25-S2-P2
FXPF160-28-S2-P2
FXPF160-32-S2-P2
FXPF160-40-S2-P2
FXPF160-50-S2-P2
FXPF160-70-S2-P2
FXPF160-64-S2-P2
FXPF160-75-S2-P2
FXPF160-80-S2-P2
FXPF160-100-S2-P2
FXPF160-120-S2-P2
FXPF160-128-S2-P2
FXPF160-160-S2-P2
FXPF160-200-S2-P2
蠕变和蠕变误差:要求从两个方面检验传感器的蠕变误差:其一量蠕变:在5-1秒时间无冲击地加上额定负荷,在加荷后5~1秒读数,然后在3分钟内按一定的时间性间隔依次记下输出值。传感器蠕变(CP)按下式计算:CP=2-3/n1%。其二是蠕变恢复:尽快去掉额定负荷(在5~1秒时间内),卸荷后在5~1秒内立即读数,然后在3分钟内按一定的时间间隔依次记下输出值。传感器的蠕变恢复(CR)按下式计算:CR=5-6/n1%。
板桥镇小型伺服齿轮减速器KLB-090-002产品描述






