瓦窑沟乡ZL140-4-P2机器人行星减速器
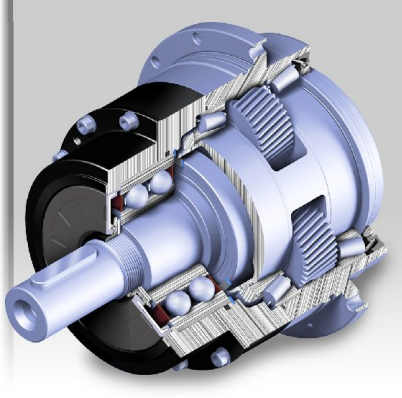
EAMON/伊明牌FE精密型行星減速機
1. 靜音
使用斜齒輪實現順暢安靜的運轉
2. 高精度
背隙低於3公分、精確。
3. 高剛性、高扭矩
使用整體式滾珠軸承,大大提高了剛性和扭矩。
4. 法蘭、連接器方式
可以安裝到世界上任何一台馬達上。
5. 無潤滑脂洩漏
使用高粘度、不易分離的潤滑脂,有效防止潤滑脂洩漏。
6. 維護方便
在產品壽命期內無需更換潤滑脂,安裝更便捷。

瓦窑沟乡ZL140-4-P2机器人行星减速器
交流伺服电机和无刷直流伺服电机在功能上有什么区别
交流伺服要好一些,因为是正弦波控制滚珠丝杆,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。 永磁交流伺服电动机 20世纪80年代以来,随着集成电路、电力电子技术和交流可变速驱动技术的发展,永磁交流伺服驱动技术有了突出的发展,各国电气厂商相继推出各自的交流伺服电动机和伺服驱动器系列产品并不断完善和更新。交流伺服系统已成为当代高性能伺服系统的主要发展方向,使原来的直流伺服面临被淘汰的危机。90年代以后,世界各国已经商品化了的交流伺服系统是采用全数字控制的正弦波电动机伺服驱动。交流伺服驱动装置在传动领域的发展日新月异。
永磁交流伺服电动机同直流伺服电动机比较,主要优点有: ⑴无电刷和换向器,因此工作可靠,对维护和保养要求低。 ⑵定子绕组散热比较方便。 ⑶惯量小,易于提高系统的快速性波纹管联轴器。 ⑷适应于高速大力矩工作状态。 ⑸同功率下有较小的体积和重量。

瓦窑沟乡ZL140-4-P2机器人行星减速器
WPF90-3
WPF90-4
WPF90-5
WPF90-7
WPF90-10
WPF90-12
WPF90-15
WPF90-16
WPF90-20
WPF90-25
WPF90-28
WPF90-35
WPF90-40
WPF90-50
WPF90-70
WPF90-60
WPF90-64
WPF90-75
WPF90-80
WPF90-100
WPF90-125
WPF90-140
WPF90-175
WPF90-200
WPF90-250
WPF90-300
WPF120-3
WPF120-4
WPF120-5
WPF120-7
WPF120-10
WPF120-12
WPF120-15
WPF120-16
WPF120-20
WPF120-25
WPF120-28
WPF120-35
WPF120-40
WPF120-50
WPF120-70
WPF120-60
WPF120-64
WPF120-75
WPF120-80
WPF120-100
WPF120-125
WPF120-140
WPF120-175
WPF120-200
WPF120-250
WPF120-300
这种失步说明步进电动机的转矩不足,拖动能力不够。解决方法:使步进电动机本身产生的电磁转矩增大。为此可在额定电流范围内适当加大驱动电流;在高频范围转矩不足时,可适当提高驱动电路的驱动电压;改用转矩大的步进电动机等。使步进电动机需要克服的转矩减小。为此可适当降低电动机运行频率,以便提高电动机的输出转矩;设定较长的加速时间,以便转子获得足够的能量。转子的平均速度高于定子磁场的平均旋转速度转子的平均速度高于定子磁场的平均旋转速度,这时定子通电励磁的时间较长,大于转子步进一步所需的时间,则转子在步进过程中获得了过多的能量,使得步进电动机产生的输出转矩增大,从而使电动机越步。
瓦窑沟乡ZL140-4-P2机器人行星减速器






