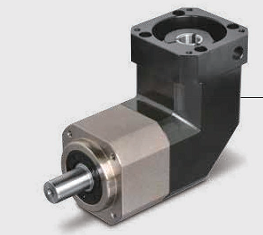
工农街道SBL142-120-P1拐角步进减速机
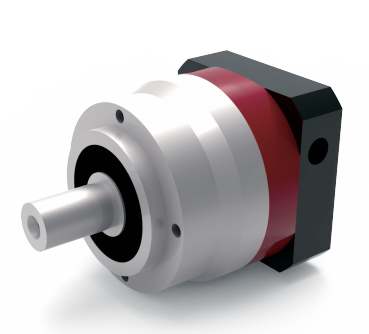
EAMON/伊明牌WPL系列行星減速機
產品參數
率:傳動效率高達97%以上
低噪音:設計精巧,精密製造,噪音低於63dB(A)
高輸入轉速:輸入轉速可達10000 rpm
低背隙:單節低於2弧分,雙節低於3弧分
高減速比:模塊化設計,行星齒輪箱可相互連接速比高
工农街道SBL142-120-P1拐角步进减速机
步进电机作为执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化控制系统中。随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。 步进电机是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。步进电机可以作为一种控制用的特种电机,利用其没有积累误差(精度为)的特点,广泛应用于各种开环控制。现在比较常用的步进电机包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)和单相式步进电机等。 永磁式步进电机一般为两相,转矩和体积较小,步进角一般为7.5度或15度 反应式步进电机一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。反应式步进电机的转子磁路由软磁材料制成,定子上有多相励磁绕组,利用磁导的变化产生转矩。 混合式步进电机是指混合了永磁式和反应式的优点。它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为0.72度。这种步进电机的应用最为广泛,也是本次细分驱动方案所选用的步进电机。

工农街道SBL142-120-P1拐角步进减速机
MFB060 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
MFB060 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
MFB060 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
MFB090 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
MFB090 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
MFB090 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
MFB115 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
MFB115 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
MFB115 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
MFB140 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
MFB140 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
MFB140 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
MFB180 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
MFB180 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
MFB180 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
MFB60 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
MFB60 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
MFB60 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
MFB90 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
MFB90 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
MFB90 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
MFB142 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
MFB142 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
MFB142 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
电主轴是一个高精度的执行元件,而影响电主轴回转精度的主要因素有:影响电主轴回转精度的主要因素有哪些?主轴误差主要包括主轴支承轴颈的圆度误差、同轴度误差(使主轴轴心线发生偏斜)和主轴轴颈轴向承载面与轴线的垂直度误差(影响主轴轴向窜动量)轴承误差轴承误差包括滑动轴承内孔或滚动轴承滚道的圆度误差,滑动轴承内孔或滚动轴承滚道的波度,滚动轴承滚子的形状与尺寸误差,轴承端面与轴心线垂直度误差,轴承端面之间的平行度误差,轴承间隙以及切削中的受力变形等。
工农街道SBL142-120-P1拐角步进减速机






