福兴街道VB115-L1-003-S2-P2智能步进减速器
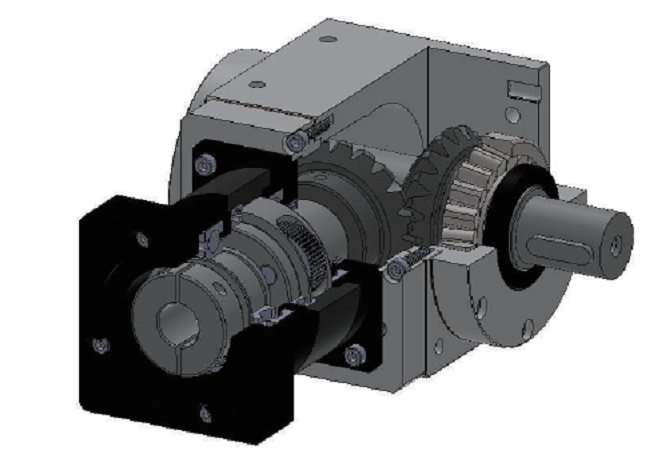
EAMON/伊明牌HPER系列圓法蘭行星減速機
規格:直角型
減速機型:HP(直齒行星減速機)
連接口:E(圓形法蘭)
減速機體型:R(90°直角輸出)
框號:42、50、60、70、80、90、120、140、160、200、215
減速比:單段=3-10;雙段=9-64;三段=48-512
出力軸鍵槽:S(標準品,帶鍵槽)、S1(實心軸,無鍵槽)、T(特殊)
峰值轉矩:14NM-2000NM

福兴街道VB115-L1-003-S2-P2智能步进减速器
一体化和集成化
电动机、反馈、控制、驱动、通讯的纵向一体化成为当前小功率伺服系统的一个发展方向。有时我们称这种集成了驱动和通讯的电机叫智能化电机,有时我们把集成了运动控制和通讯的驱动器叫智能化伺服驱动器。电机、驱动和控制的集成使三者从设计、制造到运行、维护都更紧密地融为一体。但是这种方式面临更大的技术挑战和工程师使用习惯的挑战,因此很难成为主流,在整个伺服市场中是一个很小的有特色的部分。
通用化
通用型驱动器配置有大量的参数和丰富的菜单功能,便于用户在不改变硬件配置的条件下,方便地设置成V/F控制、无速度传感器开环矢量控制、闭环磁通矢量控制、永磁无刷交流伺服电动机控制及再生单元等五种工作方式,适用于各种场合,可以驱动不同类型的电机,比如异步电机、永磁同步电机、无刷直流电机、步进电机,也可以适应不同的传感器类型甚至无位置传感器。可以使用电机本身配置的反馈构成半闭环控制系统,也可以通过接口与外部的位置或速度或力矩传感器构成高精度全闭环控制系统。
福兴街道VB115-L1-003-S2-P2智能步进减速器
VRB-090-3-S3-19DD19
VRB-090-4-S3-19DD19
VRB-090-5-S3-19DD19
VRB-090-6-S3-19DD19
VRB-090-7-S3-19DD19
VRB-090-8-S3-19DD19
VRB-090-9-S3-19DD19
VRB-090-10-S3-19DD19
VRB-090-15-S3-19DD19
VRB-090-16-S3-19DD19
VRB-090-20-S3-19DD19
VRB-090-25-S3-19DD19
VRB-090-28-S3-19DD19
VRB-090-30-S3-19DD19
VRB-090-35-S3-19DD19
VRB-090-40-S3-19DD19
VRB-090-45-S3-19DD19
VRB-090-50-S3-19DD19
VRB-090-60-S3-19DD19
VRB-090-70-S3-19DD19
VRB-090-80-S3-19DD19
VRB-090-90-S3-19DD19
VRB-090-100-S3-19DD19
VRB-090-3-S3-19EC16
VRB-090-4-S3-19EC16
VRB-090-5-S3-19EC16
VRB-090-6-S3-19EC16
VRB-090-7-S3-19EC16
VRB-090-8-S3-19EC16
VRB-090-9-S3-19EC16
VRB-090-10-S3-19EC16
VRB-090-15-S3-19EC16
VRB-090-16-S3-19EC16
VRB-090-20-S3-19EC16
VRB-090-25-S3-19EC16
VRB-090-28-S3-19EC16
VRB-090-30-S3-19EC16
VRB-090-35-S3-19EC16
VRB-090-40-S3-19EC16
VRB-090-45-S3-19EC16
VRB-090-50-S3-19EC16
VRB-090-60-S3-19EC16
VRB-090-70-S3-19EC16
VRB-090-80-S3-19EC16
VRB-090-90-S3-19EC16
VRB-090-100-S3-19EC16

常用夹具的种类:数控铣削加工常用的夹具大致有以下几种:组合夹具。适合小批量生产或研制时的中小、小型工件在数控铣床上进行铣削加工。专用铣削夹具。这是特别为某一项或类似的几项工件设计制造的夹具,一般在年产量较大或研制时非要不可时采用。其结构固定,仅使用于一个具体零件的具体工序,这类夹具设计应力求简化,使制造时间尽量缩短。多工位夹具。可以同时装夹多个工件,可减少换刀次数,已便于一面加工,一面装卸工件,有利于缩短辅助时间,提高生产率,较适合中批量生产。
福兴街道VB115-L1-003-S2-P2智能步进减速器






