吉达乡ZB060-8-S1-P2微型行星式减速机
EAMON/伊明牌JG系列方法蘭行星減速機
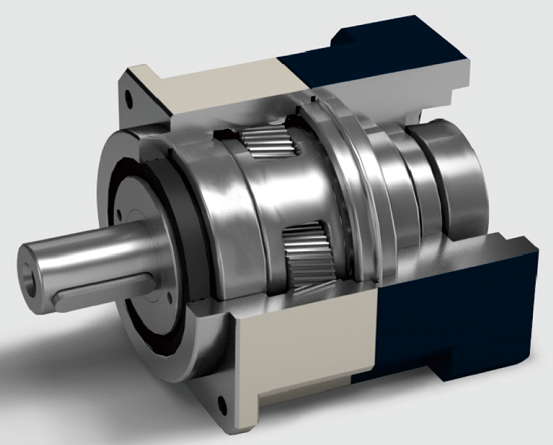
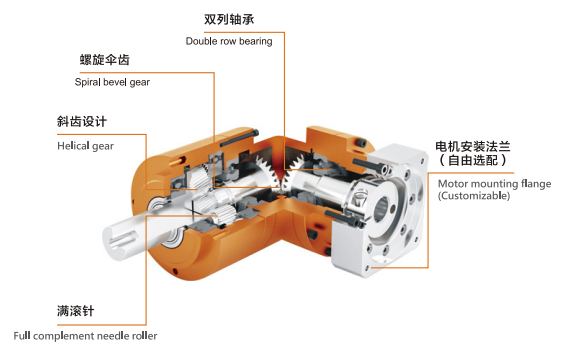
JG高精密斜齒行星減速機:
一、獨特的法蘭盤輸出方式,獲得更大安裝自由度
二、機身尺寸更短,安裝空間要求低。
三、抵回程間隙,更精準。
四、斜齒雙支撐籠式行星減速器架結構,高可靠度,可適應頻繁正反轉。
五、轉架裝配圓推滾子軸承,滿足重載工況要求。
規格範圍:64-200。速比範圍:3-100。精度範圍:1-3arcmin(p1等級)、3-5arcmin(p2等級)、5-7arcmin(p3等級)。
吉达乡ZB060-8-S1-P2微型行星式减速机
二、 行星传动齿轮强度计算要点
各种型式的行星传动皆可分解为相互啮合的几对齿轮副,其齿轮强度计算可引起定轴线齿轮传动的计算公式,但必须考虑行星传动的结构特点和运动特点。在一般条件下,NGW型行星齿轮传动,其承载能力主要取决于外啮合,因而首先计算外啮合的齿轮强度。NGW型传动中各级齿轮常取决于低速级齿轮。行星齿轮传动通常要求有较大的传动比和较小的径向尺寸,所以要选择齿轮数较多,模数较小的齿轮。在这种情况下,应先进行抗弯曲强度计算,由于行星传动的特点,在计算中,应予以考虑
三、 均在载方法的分类
使行星轮间载荷分配均匀的方法有很多种,主要靠机械方法实现均载,其结构类型可分为静定系统和静不定系统两种;
1、 静定系统:静定系统通过系统中附加的自由度实现均载。构件调位均载法即属于均载的静定系统,当行星轮间出现不均载时,构件根据受力的不同在附加自由度的范围内相应地调节位置实现均载。在静定系统中,由于基本构件浮动的均载机构具有简单、均载效果好等优点,这种机构已成为均载机构的主要和常用型式。
2、 静不定系统;a完全刚性的系统,完全依靠构件的高精度来保持均载,这种方法很不经济,很少采用。但在制造精度较高的情况下,合理地利用受力零件的柔性和轴承间隙,从而简化结构,使高精度的制造费用得到补偿。
3、 采用弹性结构的均载方法主要是利用弹性构件的弹性使各行星轮均匀分担载荷。
吉达乡ZB060-8-S1-P2微型行星式减速机
PGC050 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
PGC050 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
PGC070 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
PGC070 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
PGC090 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
PGC090 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
PGC120 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
PGC120 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
PGC155 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
PGC155 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
PGC205 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
PGC205 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
PGC50 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
PGC50 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
PGC70 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
PGC70 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
PGC90 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
PGC90 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1

开关电源是利用现代电力电子技术,控制开关晶体管开通和关断的时间比率,维持稳定输出电压的一种电源,开关电源一般由脉冲宽度调制(PWM)控制IC和MOSFET构成。开关电源和线性电源相比,二者的成本都随着输出功率的增加而增长,但二者增长速率各异。线性电源成本在某一输出功率点上,反而高于开关电源,这一成本反转点。随着电力电子技术的发展和创新,使得开关电源技术在不断地创新,这一成本反转点日益向低输出电力端移动,这为开关电源提供了广泛的发展空间。
吉达乡ZB060-8-S1-P2微型行星式减速机






