双城镇BVRB-060C-20-K5-14DG14花键轴
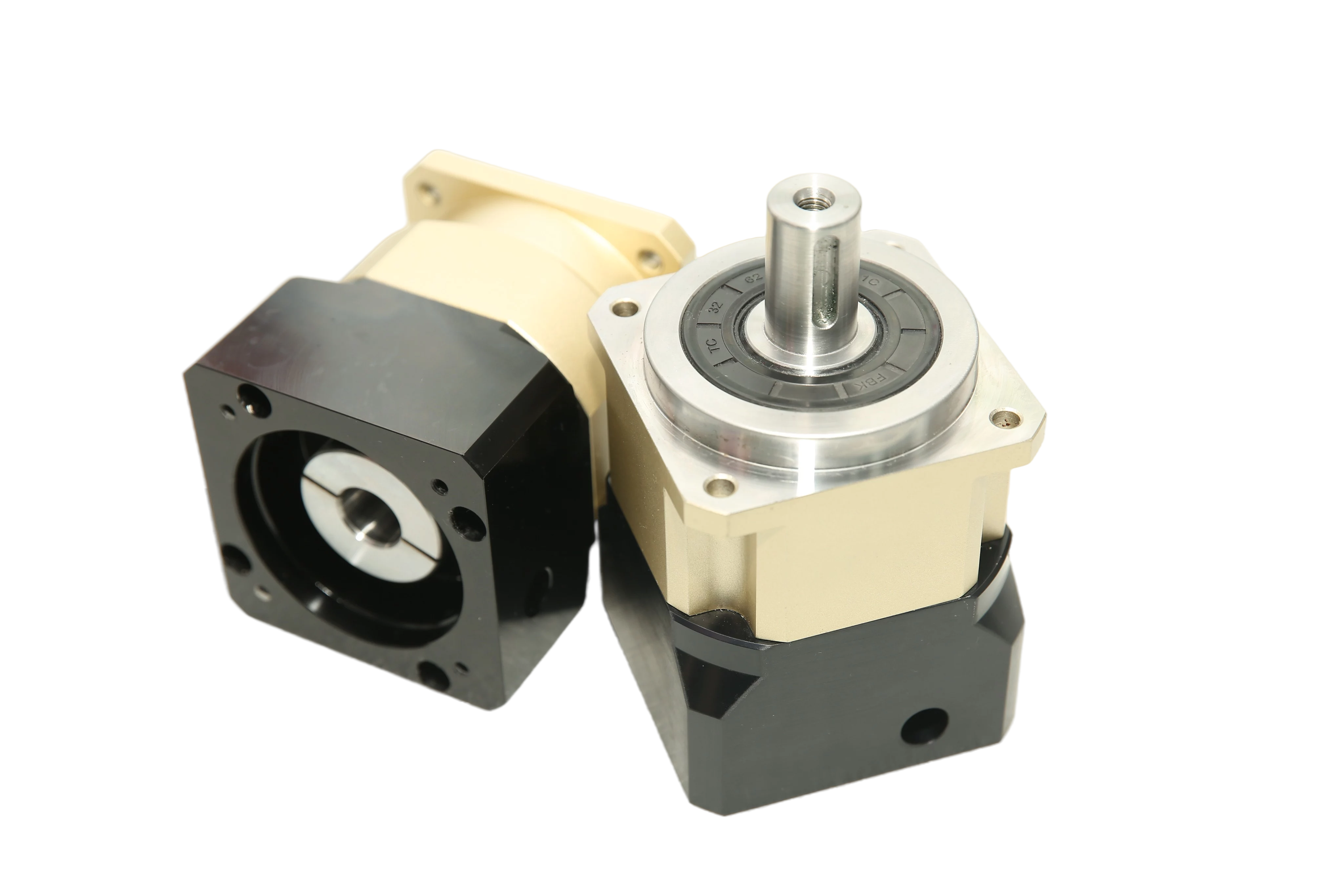
EAMON/伊明牌HB系列方法蘭行星減速機
法蘭外徑:220mm
單段速比:3、4、5、7、8、10
雙段速比:15、20、25、30、35、40、50、70、80、100
單段背隙:≤5 arcmin
雙段背隙:≤8 arcmin

双城镇BVRB-060C-20-K5-14DG14花键轴
在BLDCM中,电流滞环控制器中滞环宽度和PWM电流控制器开关频率将引起BLDCM实际电流围绕期望电流上下高频波动,电机转矩也出现高频波动,通常幅度要低于换相电流引起的转矩波动。 在PMSM中,也会出现由滞环或PWM电流控制器引起的高频转矩波动,通常比较小,并由于开关频率较高,很容易被转子惯量过滤掉。 因此,从转矩波动看,PMSM比BDLC具有明显的优势,BDLCM适合用在低性能低精度的速度和位置伺服系统。而PMSM适合用在高性能的速度和位置伺服系统。
PMSM需要正弦波电流,而BLDCM需要矩形波电流,导致了反馈元件的不同。BLDCM中,每一时刻只有两相绕组导通,每相导通120°电角度,电流每60°电角度换相一次,只要正确检测出这些换相点,就能保证电机正常运行,在空间机电系统中最常见的位置传感器是霍尔位置开关。
双城镇BVRB-060C-20-K5-14DG14花键轴
ZBR060 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
ZBR060 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
ZBR060 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
ZBR090 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
ZBR090 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
ZBR090 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
ZBR115 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
ZBR115 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
ZBR115 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
ZBR142 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
ZBR142 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
ZBR142 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
ZBR120 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
ZBR120 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
ZBR120 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
ZBR60 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
ZBR60 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
ZBR60 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
ZBR90 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
ZBR90 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
ZBR90 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1

厂内叉车行驶时货叉底端距地高度应保持3~4毫米,门架须后倾。厂内叉车工作时,起落必须平稳,如有必要须用绳子、索链封牢固必须严格按本车载荷曲线图所规定的数值叉运货物,严禁超载。叉车在运行时,不准任何人上下车,叉腿上严禁站人。厂内叉车叉载物品时,货物重量应平均分担在两货叉上,货物不得偏斜,物品的一面应贴靠挡货架。小件货物应放入集物箱(板)内,防止掉落。插车所载物品不得遮挡驾驶员视线。
双城镇BVRB-060C-20-K5-14DG14花键轴






