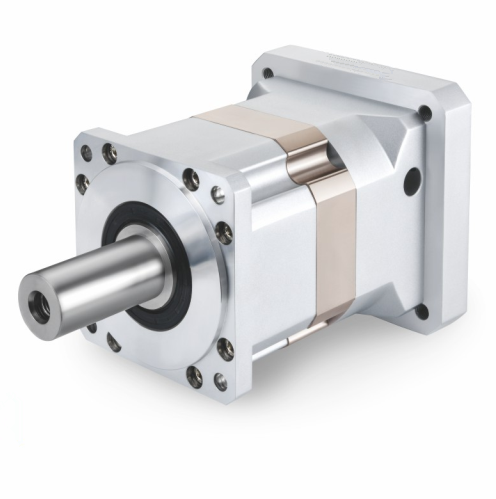
双店镇WPLF160-15佛山精密减速器
EAMON/伊明牌PTN130 自身速比是1:10和1:18,需要其他速比可加行星減速機實現;
產品明細:
PTN130-10 PTN130-18 PTN130-30 PTN130-40 PTN130-50
PTN130-70 超過70比建議加大型號;
PTN130中空轉台減速機選配電機:
1:可配任意品牌的伺服和步進電機;
2:電機功率適配400w和57步進電機;

双店镇WPLF160-15佛山精密减速器
行星减速机内部的优化设计可以体现在以下几个方面:
齿轮设计:采用高强度材料和优化设计的齿轮,能够提高齿轮的承载能力和使用寿命。同时,优化齿轮参数,如增大模数、减小齿数等,可以提高减速器的承载能力,减小设备体积和重量。
轴承设计:优化轴承设计可以提高行星减速器的可靠性和使用寿命。例如,采用高精度轴承、增加轴承数量、改变轴承安装方式等措施,可以提高行星轮的稳定性,减小振动和噪音。
润滑系统:优化润滑系统可以提高行星减速器的效率和寿命。例如,采用润滑剂、增加润滑点、提高润滑油的流动性等措施,可以减小摩擦和磨损,降低工作温度,提高设备性能和使用寿命。
密封设计:优化密封设计可以防止减速器内部润滑油的泄漏和外部灰尘的进入,提高设备的可靠性。例如,采用高精度密封件、优化密封结构等措施,可以增强密封效果,延长设备使用寿命。
热处理和表面处理:行星减速器的内部零件可能需要进行热处理和表面处理,以提高其硬度和耐磨性。例如,采用高频淬火、渗碳等热处理工艺,以及耐磨涂层、硬化处理等表面处理工艺,可以提高零件的硬度和耐磨性,延长设备的使用寿命。
总之,行星减速机内部的优化设计是多方面的,需要根据具体的应用场合和使用要求进行综合考虑。通过对行星减速机内部进行优化设计,可以提高设备的性能和使用寿命,降低噪音和能耗,使行星减速机更加适应市场需求。

双店镇WPLF160-15佛山精密减速器
MBR060 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
MBR060 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
MBR060 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
MBR090 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
MBR090 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
MBR090 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
MBR115 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
MBR115 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
MBR115 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
MBR142 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
MBR142 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
MBR142 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
MBR120 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
MBR120 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
MBR120 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
MBR60 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
MBR60 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
MBR60 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
MBR90 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
MBR90 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
MBR90 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
铸铁处的螺母可用力稍大些,塑料处要轻轻敲打。如果还是不行的话,用铁锤沿方向转圈敲打螺母,即可很轻松地拆卸螺母。:有些螺丝绣蚀很严重,用上述方法仍不奏效,即可采用火攻。用气焊氧化焰把螺丝,螺母充分烧烤,然后向烧红的螺丝滴上一丝油。加热螺丝的目的是使螺丝受热膨胀。滴油的目的是使螺丝遇冷迅速收缩,加大丝杆与不锈钢螺母间的间隙,油流入后螺母即可拧下。不过如果附近有塑料器件慎用此法。:有些器件的不锈钢螺丝顶部腐蚀走形,无法用扳手,钢丝钳卸出,既可用冲击法。3金属体和非金属要进行远距离检测和控制时,应选用光电型接近传感器或超声波型接近传感器。4对于检测体为金属时,若检测灵敏度要求不高时,可选用价格低廉的磁性接近传感器或霍尔式接近传感器。2接近传感器技术指标检测3.2.1动作距离测定;当动作片由正面靠近接近传感器的感应面时,使接近传感器动作的距离为接近传感器的动作距离,测得的数据应在产品的参数范围内。2释放距离的测定;当动作片由正面离开接近传感器的感应面,开关由动作转为释放时,测定动作片离开感应面的距离。3回差H的测定;动作距离和释放距离之差的值。4动作频率测定;用调速电机带动胶木圆盘,在圆盘上固定若干钢片,调整开关感应面和动作片间的距离,约为开关动作距离的8%左右,转动圆盘,依次使动作片靠近接近传感器,在圆盘主轴上装有测速装置,开关输出信号经整形,接至数字频率计。此时启动电机,逐步提高转速,在转速与动作片的乘积与频率计数相等的条件下,可由频率计直接读出开关的动作频率。5重复精度测定;将动作片固定在量具上,由开关动作距离的12%以外,从开关感应面正面靠近开关的动作区,运动速度控制在.1mm/s上。
双店镇WPLF160-15佛山精密减速器






