天星乡GPB060-P2-S2-35广州直角中实减速机
EAMON/伊明牌AB220精密行星減速機適用軸徑:
單段適合軸徑:≤55mm;
雙段適合軸徑:≤42mm;
AB220精密行星減速機減速比:
單段速比:3, 4, 5, 7, 10;
雙段速比:15, 20, 25, 30,35, 40, 50, 70, 100;
AB220精密行星減速機背隙:
單段:≤3arcmin / ≤5arcmin(P1/P2);
雙段:≤5arcmin / ≤7arcmin(P1/P2);
AB220精密行星減速機輸出額定力矩:
T2N:1500 Nm -2000 Nm;
AB220精密行星減速機轉動慣量:
J1:23.29-54.37 Kg·cm^2
AB220精密行星減速機效率:
單段:≤ 97%;
雙段:≤ 94%;

天星乡GPB060-P2-S2-35广州直角中实减速机
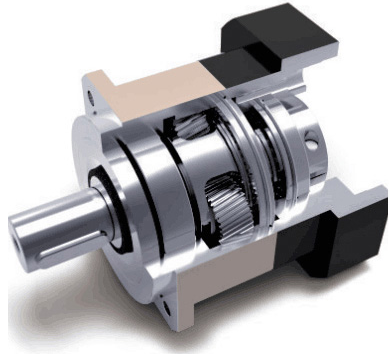
伺服减速机的原理及应用
伺服减速机是一种精密的驱动设备,主要用于需要高精度、高稳定性位置控制的场合。它通过接收编码器的反馈信号,实现高精度、高响应的速度和位置控制。伺服减速机广泛应用于机器人、自动化设备、机床、仪器等领域。
1. 伺服减速机的工作原理
伺服减速机的工作原理主要基于行星齿轮系的工作原理。在伺服减速机中,通常将伺服电机(或者步进电机)与行星齿轮机构相连接。行星齿轮机构具有高精度、高扭矩、低回差等特点,能够很好的满足伺服电机的需求。
伺服减速机的工作原理可以分为三个部分:
1. 输入轴:输入轴接收到伺服电机的旋转指令,成为驱动轮,驱动轮与行星齿轮机构的外壳啮合,通过齿轮的转动,将电机的动力传递到行星齿轮机构的内部。
2. 行星齿轮机构:行星齿轮机构内部的每个齿轮都与伺服电机的绕组相连接,当齿轮旋转时,会带动电机的绕组旋转,从而实现电机的旋转。
3. 输出轴:输出轴连接到负载上,当伺服减速机工作在减速状态时,输出轴的速度低于输入轴的速度;当伺服减速机工作在增速状态时,输出轴的速度高于输入轴的速度。
2. 伺服减速机的特点
- 高精度:伺服减速机的主要特点是高精度,可以实现微米级的位置控制。
- 高刚性:由于采用了行星齿轮机构,伺服减速机具有很高的刚性,可以承受较大的冲击力。
- 高响应速度:伺服减速机可以在短时间内完成位置转换,响应速度快。
- 高可靠性:行星齿轮机构的构造简单,可靠度高,使用寿命长。
3. 伺服减速机的应用
伺服减速机广泛应用于机器人、自动化设备、机床、仪器等领域。例如,在机器人领域,伺服减速机可以用于驱动机械手的关节,实现的运动控制;在自动化设备领域,伺服减速机可以用于控制生产线上的物料输送系统,实现的位置控制;在机床领域,伺服减速机可以用于控制刀库的换刀动作,实现的刀具更换;在仪器领域,伺服减速机可以用于控制手术器械的动作,实现的手术操作。
4. 结论
伺服减速机以其高精度、高响应速度和高可靠性等优点,在各种工业应用中发挥着重要的作用。随着科技的快速发展,伺服减速机的技术也在不断进步,未来的应用领域将会更加广泛。同时,我们也要认识到,如何正确选择和使用伺服减速机,以发挥其的效益,是我们需要关注的问题。
天星乡GPB060-P2-S2-35广州直角中实减速机
VRB-060-3-K5-19DB19
VRB-060-4-K5-19DB19
VRB-060-5-K5-19DB19
VRB-060-6-K5-19DB19
VRB-060-7-K5-19DB19
VRB-060-8-K5-19DB19
VRB-060-9-K5-19DB19
VRB-060-10-K5-19DB19
VRB-060-15-K5-19DB19
VRB-060-16-K5-19DB19
VRB-060-20-K5-19DB19
VRB-060-25-K5-19DB19
VRB-060-28-K5-19DB19
VRB-060-30-K5-19DB19
VRB-060-35-K5-19DB19
VRB-060-40-K5-19DB19
VRB-060-45-K5-19DB19
VRB-060-50-K5-19DB19
VRB-060-60-K5-19DB19
VRB-060-70-K5-19DB19
VRB-060-80-K5-19DB19
VRB-060-90-K5-19DB19
VRB-060-100-K5-19DB19
VRB-060-3-K5-14BJ14
VRB-060-4-K5-14BJ14
VRB-060-5-K5-14BJ14
VRB-060-6-K5-14BJ14
VRB-060-7-K5-14BJ14
VRB-060-8-K5-14BJ14
VRB-060-9-K5-14BJ14
VRB-060-10-K5-14BJ14
VRB-060-15-K5-14BJ14
VRB-060-16-K5-14BJ14
VRB-060-20-K5-14BJ14
VRB-060-25-K5-14BJ14
VRB-060-28-K5-14BJ14
VRB-060-30-K5-14BJ14
VRB-060-35-K5-14BJ14
VRB-060-40-K5-14BJ14
VRB-060-45-K5-14BJ14
VRB-060-50-K5-14BJ14
VRB-060-60-K5-14BJ14
VRB-060-70-K5-14BJ14
VRB-060-80-K5-14BJ14
VRB-060-90-K5-14BJ14
VRB-060-100-K5-14BJ14
这是个很好的检验轴圈和轴中心线垂直度的方法。轴承安装装反了,不仅轴承工作不正常,且各配合面会遭到严重磨损。由于轴圈与座圈和区别不很明显,装配中应格外小心,不能出现装反。安装正确的时候应当是其座圈能自动适应滚动体的滚动,确保滚动体位于上下圈滚道。除此之外,INA轴承的座圈与轴承座孔之间还应留有.2—.5mm的间隙,用以补偿零件加工、安装不造成的误差,当运转中轴承套圈中心偏移时,此间隙可确保其自动调整,避免碰触摩擦,使其正常运转。
天星乡GPB060-P2-S2-35广州直角中实减速机






