龙兴街道TBR90-L1-A22-14-50-70-M5以诚待人
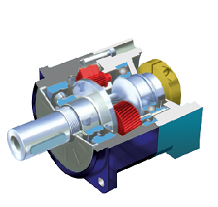
EAMON/伊明牌PT150系列精密盤面式行星減速機
圓形盤面法蘭輸出,安裝牢固;
可以降低電機的轉速,同時增大輸出轉矩;
具有重量輕、體積小;
傳動比範圍大、效率高;
運轉平穩、噪聲低、適應性強等特點。
適配電機功率:1500W、3000W伺服電機,130步進電機等
適用於任何廠商所製造的驅動產品連接,如:松下、安川、三菱、富士、三洋、發那科、西門子、施耐德、科爾摩根、東元、台達、匯川、禾川、信捷等交流伺服電機、直流伺服電機、步進電機的減速傳動。

龙兴街道TBR90-L1-A22-14-50-70-M5以诚待人
平行减速机连接滚筒的双轨和单轨各有优缺点,具体选择应该根据具体的应用场景和使用需求来判断。
双轨减速机通常具有更高的承载能力和更强的过载保护能力,因此更适合重载、大功率和需要高可靠性的应用场景。此外,双轨减速机的接触面积较大,可以更好地分散负载,减少了每个滚轮承受的压力,从而降低了滚轮的磨损和变形风险。但是,双轨减速机的结构相对复杂,维护和调整相对困难,而且价格通常也更高。
单轨减速机则具有结构简单、体积小、重量轻、维护方便、价格低廉等优点。在一些对承载能力和过载保护要求不高的应用场景中,单轨减速机是一个更经济的选择。但是,单轨减速机的接触面积较小,每个滚轮承受的压力较大,因此更容易出现磨损和变形问题。
因此,在选择平行减速机连接滚筒的双轨和单轨时,需要根据实际的应用场景和使用需求进行综合考虑。如果对承载能力、过载保护和可靠性要求较高,可以选择双轨减速机;如果对价格、体积和重量有较高要求,可以选择单轨减速机。

龙兴街道TBR90-L1-A22-14-50-70-M5以诚待人
MF90HL2-15-M-K-19-70
PG90L2-50-14-50
ZDH120L2-30-22-110
PG120L1-7-22-95
MF180HL2-100-M-K-22-110
PG60L2-50-11-50
PG120L1-7-22-95
PB120-6-P2
PB142-7-P2
MF180HL2-100-M-K-22-110
PGL115-70-ArcminP2
PG60L2-40-14-50
MF150SL2-15-24-110
PG120L2-100-16-80
MF120SL2-12-24-110-T
MF120SL1-5-19-110
PG120FL1-10-22-110-Y
PG60L1-5-14-50
PG60-L1-5-14-50
PG60L2-20-14-50-Y-14
PG60FL1-5-14-50
PG60FL1-10-14-50-Y
PG120L2-50-19-95-S
MFL120-L1-5-M-K-24-110
1FL6044-1AF61-2LB1
MF90X-L1-10-K-19-70
MF150H-L1-10-M-K-35-114.3
PG120FL1-10-22-110-Y
MF120SL2-25-24-110
DF60L1-10-14-50
MF150XL2-25-K-22-110
DF90L2-100-14-50-70-M5
GNP90-10-14-50-70-M5
SG120TPL2-25-24-110
SG120L2-40-22-110
ZDH150L1-10-35-114.3
SG150L1-10-35-114.3
PF120L2-100-19-70
MF120SL3-100-19-70
PG120L2-20-24-110
PF90L1-10-16-80
MF120SL2-16-24-110
SK+140S-MF1-4-0K1-1K00
PG60L1-10-14-50-S
PG60L1-10-14-50-S/10:1
ZDH120L2-20-22-110-1.5KW
GNP90L1-5-19-70-90-M6
MF150SL2-30-24-95
MF60HL2-25-M-K-14-50
MF40HL1-8-M-K-8-30
PF90L2-100-14-50
PG90L1-10-14-80
PF90L1-5-19-70
PF60L1-3-14-50-Y-14
MF090L1-5-14-50
MFT120-S1-L1-5-K-24-110
MFT120-S0-L1-10-K-22-110
MFT60-S0-L1-3-K-14-50
MF90HL1-5-M-K-16-70
PB180-20-P2
PG90L2-25-14-50
PG90L2-30-19-70
MF090SL2-20-19-70
或者速度回传改变以encoder变化为参考,使信号分辨率增加以期得到更佳的控制。电机能够运转顺畅而且响应良好,P.I.D.控制的恰当与否也无法忽视。之前提到直流无刷电机是闭回路控制,因此回授信号就等于是告诉控制部现在电机转速距离目标速度还差多少,这就是误差(Error)。知道了误差自然就要补偿,方式有传统的工程控制如P.I.D.控制。但控制的状态及环境其实是复杂多变的,若要控制的坚固耐用则要考虑的因素恐怕不是传统的工程控制能完全掌握,所以模糊控制、专家系统及神经网络也将被纳入成为智能型P.I.D.控制的重要理论。
龙兴街道TBR90-L1-A22-14-50-70-M5以诚待人






