元堡子镇NMRV150蜗轮蜗杆减速机免保养步进减速器
EAMON/伊明牌ATC系列轉向行星減速機
框號:042、060、090、120、140、180
減速比:1、2、3、5
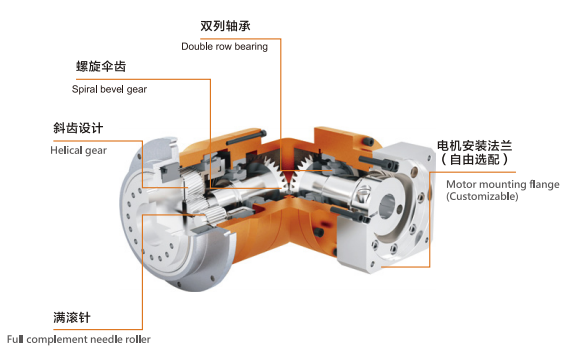
產品特點:ATC系列採用蝸線傘型齒輪設計;背隙可根據客戶要求調整;低噪音等特性;精巧的外殼設計可搭配任何方向;安裝容易,能配合多種馬達或加裝減速機;多樣式輸出(空心輸出、實心輸出、雙向輸出);全密封結構、免維護。
元堡子镇NMRV150蜗轮蜗杆减速机免保养步进减速器
行星减速机通过内部齿轮系统的组合和优化,将输入的旋转运动减速并传递给输出轴。在这个过程中,行星减速机可以地控制和改变金属表面处理设备的功率和速度。
具体来说,行星减速机的功率和速度改变主要通过以下方式实现:
通过改变输入的转速,即电机的转速,来改变行星减速机的输出转速,从而改变金属表面处理设备的功率和速度。
通过改变行星轮的数量和分布,以及行星轮与太阳轮和内齿环的齿数比,来改变行星减速机的减速比,进而改变金属表面处理设备的功率和速度。
通过调整齿轮的修形和润滑状态,以及齿轮材质和热处理方式,来改变行星减速机的传动效率、承载能力和使用寿命,从而影响金属表面处理设备的功率和速度。
总的来说,行星减速机在金属表面处理设备中的主要作用是控制和调整设备的功率和速度,以满足不同的加工需求和应用场景。

元堡子镇NMRV150蜗轮蜗杆减速机免保养步进减速器
PBL060 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
PBL060 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
PBL060 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
PBL090 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
PBL090 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
PBL090 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
PBL115 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
PBL115 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
PBL115 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
PBL142 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
PBL142 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
PBL142 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
PBL120 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
PBL120 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
PBL120 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
PBL62 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
PBL62 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
PBL62 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
PBL90 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
PBL90 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
PBL90 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
传感器的重复性误差(R)按下式计算:R=R/n1%。R--同一试验点上3次测量的实际输出信号值之间的差值。滞后误差:滞后误差的通俗意思是:逐级施加负荷再依次卸下负荷时,对应每一级负荷,理想情况下应有一样的读数,但事实上下一致,这不一致的程度用滞后误差这一指标来表示。国标中是这样来计算滞后误差的:传感器的滞后误差(H)按下式计算:H=H/n1%。H--同一试验点上3次行程实际输出信号值的算术平均与3次上行程实际输出信号值的算术平均之间的差值。
元堡子镇NMRV150蜗轮蜗杆减速机免保养步进减速器






