旧县街道FKTD85B-70/100比直流伺服齿轮减速机
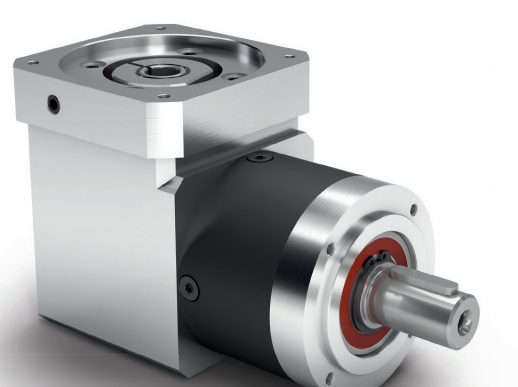
EAMON/伊明牌EVB115轉角斜齒輪行星減速機技術參數:
EVB115精密斜齒減速機的減速比:
單段減速比:3,4,5,6,7,8,10,12,14,20;
雙段/三段減速比:15,25,30,35,40,45,50,60,70,80,120,100,120,140,160,200;
EVB115精密行星減速機背隙:
單段:≤7arcmin(P1);
雙段:≤9arcmin(P1);
EVB115減速機輸出額定力矩:
T2N:230 Nm - 325 Nm;
EVB115轉角減速機效率:
單段:≤ 95%;
雙段:≤ 92%;

旧县街道FKTD85B-70/100比直流伺服齿轮减速机
在数控手术设备上应用行星伺服减速机的研究
一、引言
随着科技的不断发展,数控手术设备在手术室中的应用越来越广泛。这些设备通过对手术器械的控制,能够实现高精度、率和安全可靠的手术操作。伺服驱动系统由于其出色的动态性能和控制能力,在数控手术设备中得到广泛应用。行星伺服减速机作为一种精密的传动装置,能够将伺服电机的转速降低,扭矩增大,提高系统的稳定性。本文将探讨在数控手术设备上应用行星伺服减速机的重要性和优势。
二、伺服系统与行星减速机概述
伺服系统
伺服系统是一种能够跟随和复现输入信号的控制系统。在数控手术设备中,伺服系统可以根据手术操作的需求,对手术器械的位移、速度和加速度等参数进行控制,以满足不同的手术操作要求。
行星减速机
行星减速机是一种常见的机械传动装置,通过行星轮系的工作原理,能够将伺服电机的输出转速降低,增大输出扭矩。在数控手术设备中,行星减速机能够优化伺服系统的性能,提高系统的稳定性和可靠性。
三、在数控手术设备上应用行星伺服减速机的优势
提高手术操作的精度和稳定性
通过将伺服电机与行星减速机结合使用,数控手术设备能够实现高精度、高稳定性的手术操作。伺服系统能够对手术器械的位移、速度和加速度等参数进行控制,以满足不同的手术操作要求。行星减速机降低伺服电机的转速,提高输出扭矩,从而实现手术器械的平稳、高速动作。这样可以大幅提高手术操作的精度和稳定性。
优化设备的能耗,提高工作效率
伺服系统和行星减速机的配合使用,能够优化数控手术设备的能耗,提高工作效率。伺服电机的控制可以减少无效运动和能源浪费,行星减速机降低转速的同时增加了扭矩,使得设备在手术过程中更加节能。
增强设备的可靠性和耐用性
行星伺服减速机具有较高的传动效率和良好的润滑性能,这使得数控手术设备在长期高强度使用过程中,能够保持稳定、可靠的运行状态。同时,伺服系统的控制可以减少设备的磨损和应力,从而延长其使用寿命。
四、应用策略及优化方法
为了更好地发挥行星伺服减速机在数控手术设备中的优势,以下是一些建议:
合理选择伺服电机与行星减速机型号:根据具体的应用场景和需求,应选择适合的伺服电机和行星减速机型号。考虑到手术设备的特殊性质,应选择具有较强扭矩、较低噪音和良好散热性能的行星减速机。
控制伺服系统的参数:通过控制伺服电机的速度、位移以及行星减速机的减速比等参数,可以实现手术设备制造过程的控制。此外,还要根据不同的制造工艺要求,对伺服系统的参数进行精细化调整。
实施实时监控与反馈:通过实时监控制造过程中的数据,对伺服系统和行星减速机进行精细调整,实现的制造效果4. 。同时对设备的运行状态进行实时监测及时发现并解决问题确保设备的稳定性和可靠性4. 。同时,实施对设备的运行状态进行实时监测及时发现并解决问题确保设备的稳定性和可靠性5. 完善故障诊断与预警系统:为了及时发现并解决设备潜在的问题建议完善故障诊断与预警系统通过实时监测设备的运行参数和状态对异常情况进行预警和诊断并采取相应的措施进行处理从而避免生产事故的发生提高设备的可靠性5. 。完善故障诊断与预警系统为了及时发现并解决设备潜在的问题建议完善故障诊断与预警系统通过实时监测设备的运行参数状态对异常情况进行预警和诊断并采取相应的措施进行处理避免生产事故的发生提高设备的可靠性.完善故障诊断与预警系统为了及时发现并解决设备潜在的问题建议完善故障诊断与预警系统通过实时监测设备的运行参数和状态对异常情况进行预警和诊断并采取相应的措施进行处理从而避免生产事故的发生提高设备的可靠性.。
定期维护与保养:为了保证伺服系统和行星减速机的长期稳定运行. 定期进行维护和保养是必要的这包括检查润滑状况清理尘埃更换磨损件等措施通过对设备的定期维护和保养可以延长设备的使用寿命提高设备的可靠性和稳定性.。
加强员工培训和技术支持:为了更好地发挥行星伺服减速机和数控手术设备的优势下点是为员工提供培训和技术支持的重要性不容忽视通过培训员工掌握设备操作维护保养和故障排除等技术知识确保设备能够得到充分利用并且及时准确的响应用户的需求同时提供及时的技术支持解决设备运行过程中的技术问题确保生产的顺利进行避免因技术问题导致停工
旧县街道FKTD85B-70/100比直流伺服齿轮减速机
PHL90-3-L1-P1
PHL90-4-L1-P1
PHL90-5-L1-P1
PHL90-6-L1-P1
PHL90-7-L1-P1
PHL90-8-L1-P1
PHL90-10-L1-P1
PHL90-12-L2-P1
PHL90-15-L2-P1
PHL90-20-L2-P1
PHL90-25-L2-P1
PHL90-30-L2-P1
PHL90-35-L2-P1
PHL90-40-L2-P1
PHL90-50-L2-P1
PHL90-60-L2-P1
PHL90-70-L2-P1
PHL90-80-L2-P1
PHL90-100-L2-P1
PHL115-3-L1-P1
PHL115-4-L1-P1
PHL115-5-L1-P1
PHL115-6-L1-P1
PHL115-7-L1-P1
PHL115-8-L1-P1
PHL115-10-L1-P1
PHL115-12-L2-P1
PHL115-15-L2-P1
PHL115-20-L2-P1
PHL115-25-L2-P1
PHL115-30-L2-P1
PHL115-35-L2-P1
PHL115-40-L2-P1
PHL115-50-L2-P1
PHL115-60-L2-P1
PHL115-70-L2-P1
PHL115-80-L2-P1
PHL115-100-L2-P1

利用ANSYS静力学分析模块以及CFX或FLUENT等流体分析模块对有固定约束条件的板壳结构进行流-固耦合分析的实例已经很多,ANSYSWorkbench中也有这方面的耦合实例。但是对于流体冲击引起结构的大位移以及较大变形的动力学分析目前还不完善,有待进一步的研究。因此本文应用大型通用有限元分析软件ANSYS13.中的显示动力分析模块LS-DYNA以及流体分析模块FLUENT,对受流体冲击作用下兼有大位移及较大变形的板壳结构的流-固耦合作用进行了仿真分析。
旧县街道FKTD85B-70/100比直流伺服齿轮减速机






