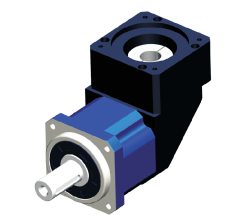
桂花乡PLFS120-50江苏弯头减速器

伊明传动科技(厦门)有限公司
中国 厦门
产品属性
图文详情
品牌推荐
品牌
EAMON/伊明牌
型号
AB-AD-AE-PLF-PLE-SP-LP
类型
行星齿轮减速器
载荷状态
均匀载荷
传动比级数
多级
轴的相对位置
立式加速器
传动布置形式
同轴式
加工定制
加工定制
样品或现货
现货
齿面硬度
硬齿面
减速比
3-100
输出转速范围
3000-8000rpm
输入转速
3000r/min
额定功率
50-3500kw
许用扭矩
10-1200N.m
使用范围
伺服电机,步进马达,异步电机
外形尺寸
42-330mm
重量
1-50kg
一段速比
3-10
二段速比
12-100
三段速比
60-1000
背隙
3-10弧分
法兰大小
42-330mm
桂花乡PLFS120-50江苏弯头减速器
伺服行星减速机产生噪音的原因可能涉及多个因素。以下是对这些因素的分析:
齿轮设计:伺服行星减速机的齿轮设计对噪音有重要影响。如果齿轮的参数(如模数、齿数、压力角等)设计不合理, 可能会导致齿轮啮合不良,从而产生噪音。此外,如果齿轮的齿形误差或基节误差过大,也会引起噪音。
齿轮制造精度:伺服行星减速机的齿轮制造精度对其性能和噪音也有很大影响。如果齿轮的制造精度低,例如齿面粗糙 度大、齿形误差大、齿面不平衡等,会导致齿轮在运转过程中产生振动和噪音。
装配精度:在装配过程中,如果未能保证适当的对中或平行度,可能会导致齿轮在运转时产生额外的振动和噪音。
润滑不良:如果润滑剂选择不当或添加量不合适,可能会使齿轮在运转过程中产生摩擦和振动,进而产生噪音。
负载波动:伺服行星减速机在运转过程中所承受的负载波动可能引起齿轮的振动和噪音。例如,负载的突变或不稳定可 能导致齿轮冲击,从而产生噪音。
机械振动:伺服行星减速机本身或其他机械部件的振动可能导致噪音的产生。例如,轴的弯曲、轴承的不平衡或松动等 都可能引起机械振动。
环境因素:环境因素如工作场所的噪声、设备布局等也可能对伺服行星减速机的噪音产生影响。
为了降低伺服行星减速机的噪音,可以采取以下措施:
设计优化:对齿轮设计进行优化,选择适当的参数和齿形,以降低齿轮啮合时的振动和噪音。
提高制造和装配精度:通过提高齿轮制造和装配精度,减少齿面粗糙度、齿形误差和不平衡量等,从而降低噪音。
合理选择润滑剂:根据设备的工作条件和要求,选择合适的润滑剂并确保添加量适中,以减少因摩擦产生的噪音。
负载平稳控制:通过控制负载的平稳性,避免负载突变或不稳定对齿轮产生的冲击,从而降低噪音。
减振措施:采取减振措施如增加减振器、弹性支承等,以减少机械振动和噪音。
隔声措施:通过采用隔声材料和结构,将伺服行星减速机与周围环境隔开,以降低噪音对周围环境的影响。
定期维护和检查:定期对伺服行星减速机进行维护和检查,及时发现并解决可能存在的故障或问题,以降低噪音。
总之,伺服行星减速机产生噪音的原因是多方面的,可以通过采取一系列措施降低或消除噪音。在实际操作中,应根据 具体情况选择合适的方法来降低伺服行星减速机的噪音。
桂花乡PLFS120-50江苏弯头减速器
伺服行星减速箱是伺服系统中非常重要的一部分,它可以提供更低的转速和更大的扭矩,同时将电机的旋转运动转换为更复杂的线性运动。在使用伺服行星减速箱时,需要注意以下事项:
磨合期:伺服行星减速箱在安装和运行时需要进行磨合期。磨合期是指在规定的载荷和时间内,让减速箱逐渐适应工作状态,以防止过热或过早磨损。在磨合期间,应限制减速器的工作负荷不超过其额定工作负荷的85%,并安排合适的工作时间,避免减速器过热。同时,需要经常观察减速器的运行情况,如有异常应及时停止并排除故障。
润滑:伺服行星减速箱需要使用合适的润滑油进行润滑,以减少摩擦和磨损。润滑油的选择和更换需要根据减速箱的型号和使用条件进行选择和更换。一般来说,输入功率大的减速箱需要使用更高级别的润滑油,并且需要经常检查润滑油的质量和数量。
清洁:伺服行星减速箱需要保持清洁,避免灰尘、杂质和水分进入减速箱内部。在安装和拆卸过程中,应避免使用不合适的工具或方法,以免损坏减速箱内部零件。
紧固:伺服行星减速箱的各部分连接需要保持紧固,特别是输出轴和输入轴等关键部位。在运行过程中,如果发现有松动的现象,应立即停止并检查是否需要紧固。
维护:伺服行星减速箱需要定期进行维护检查,包括润滑油的更换、齿轮磨损的检查等。在维护过程中,应避免随意拆卸和调整内部零件,以免造成损坏或影响性能。
使用环境:伺服行星减速箱需要在合适的环境下工作,避免过高的温度、湿度、粉尘和冲击等恶劣环境条件的影响。如果必须在这些环境下工作,应采取相应的防护措施,如加装防护罩、提供清洁的工作环境等。
安全系数:在不同的应用场合下,需要选择合适的安全系数来保证伺服行星减速箱的正常使用。安全系数过小会导致行星减速箱过载或损坏,而安全系数过大则会造成浪费和不必要的成本。
总之,伺服行星减速箱在使用过程中需要注意许多事项。只有正确使用和保养,才能保证其长期稳定的工作,从而达到提高伺服系统性能和延长其使用寿命的目的。如果不注意这些事项,可能会导致减速箱过早磨损或损坏,影响整个伺服系统的性能和使用寿命。因此,在使用伺服行星减速箱时,必须严格遵守使用说明书中的各项注意事项,确保其正常运转和延长使用寿命。同时,对于一些特殊的使用环境或场合,还需要根据实际情况采取一些特殊的措施来保证其正常运转和使用寿命。

桂花乡PLFS120-50江苏弯头减速器
SPK 140S-MF1-3 -4 -5 -7 -10-1K1
SPK 140S-MF2-16 -20 -25 -28 -35 -40 -50 -70 -100-1K1
SPK 140S-MF1-3 -4 -5 -7 -10-1EO
SPK 140S-MF2-16 -20 -25 -28 -35 -40 -50 -70 -100-1EO
SPK 100S-MF1-3 -4 -5 -7 -10-1E1-2S
SPK 100S-MF2-16 -20 -25 -28 -35 -40 -50 -70 -100-1E1-2S
SPK 060S-MF1-3 -4 -5 -7 -10-1C1
SPK 060S-MF2-16 -20 -25 -28 -35 -40 -50 -70 -100-1C1
SPK 100S-MF1-3 -4 -5 -7 -10-1C1
SPK 100S-MF2-16 -20 -25 -28 -35 -40 -50 -70 -100-1C1
SPK 140S-MF1-3 -4 -5 -7 -10-2K1-2S
SPK 140S-MF2-16 -20 -25 -28 -35 -40 -50 -70 -100-2K1-2S
SPK 140S-MC1-3 -4 -5 -7 -10-1K1-2K
SPK 140S-MC2-16 -20 -25 -28 -35 -40 -50 -70 -100-1K1-2K
SPK 140S-MC1-3 -4 -5 -7 -10-1K1-2K
SPK 140S-MC2-16 -20 -25 -28 -35 -40 -50 -70 -100-1K1-2K
SPK 210S-MF1-3 -4 -5 -7 -10-0M1
SPK 210S-MF2-16 -20 -25 -28 -35 -40 -50 -70 -100-0M1
SPK 180S-MF1-3 -4 -5 -7 -10-0K1
SPK 180S-MF2-16 -20 -25 -28 -35 -40 -50 -70 -100-0K1
SPK 075S-MF1-3 -4 -5 -7 -10-0C1-2S

蠕变和蠕变误差:要求从两个方面检验传感器的蠕变误差:其一量蠕变:在5-1秒时间无冲击地加上额定负荷,在加荷后5~1秒读数,然后在3分钟内按一定的时间性间隔依次记下输出值。传感器蠕变(CP)按下式计算:CP=2-3/n1%。其二是蠕变恢复:尽快去掉额定负荷(在5~1秒时间内),卸荷后在5~1秒内立即读数,然后在3分钟内按一定的时间间隔依次记下输出值。传感器的蠕变恢复(CR)按下式计算:CR=5-6/n1%。
桂花乡PLFS120-50江苏弯头减速器
伺服行星减速机产生噪音的原因可能涉及多个因素。以下是对这些因素的分析:
齿轮设计:伺服行星减速机的齿轮设计对噪音有重要影响。如果齿轮的参数(如模数、齿数、压力角等)设计不合理, 可能会导致齿轮啮合不良,从而产生噪音。此外,如果齿轮的齿形误差或基节误差过大,也会引起噪音。
齿轮制造精度:伺服行星减速机的齿轮制造精度对其性能和噪音也有很大影响。如果齿轮的制造精度低,例如齿面粗糙 度大、齿形误差大、齿面不平衡等,会导致齿轮在运转过程中产生振动和噪音。
装配精度:在装配过程中,如果未能保证适当的对中或平行度,可能会导致齿轮在运转时产生额外的振动和噪音。
润滑不良:如果润滑剂选择不当或添加量不合适,可能会使齿轮在运转过程中产生摩擦和振动,进而产生噪音。
负载波动:伺服行星减速机在运转过程中所承受的负载波动可能引起齿轮的振动和噪音。例如,负载的突变或不稳定可 能导致齿轮冲击,从而产生噪音。
机械振动:伺服行星减速机本身或其他机械部件的振动可能导致噪音的产生。例如,轴的弯曲、轴承的不平衡或松动等 都可能引起机械振动。
环境因素:环境因素如工作场所的噪声、设备布局等也可能对伺服行星减速机的噪音产生影响。
为了降低伺服行星减速机的噪音,可以采取以下措施:
设计优化:对齿轮设计进行优化,选择适当的参数和齿形,以降低齿轮啮合时的振动和噪音。
提高制造和装配精度:通过提高齿轮制造和装配精度,减少齿面粗糙度、齿形误差和不平衡量等,从而降低噪音。
合理选择润滑剂:根据设备的工作条件和要求,选择合适的润滑剂并确保添加量适中,以减少因摩擦产生的噪音。
负载平稳控制:通过控制负载的平稳性,避免负载突变或不稳定对齿轮产生的冲击,从而降低噪音。
减振措施:采取减振措施如增加减振器、弹性支承等,以减少机械振动和噪音。
隔声措施:通过采用隔声材料和结构,将伺服行星减速机与周围环境隔开,以降低噪音对周围环境的影响。
定期维护和检查:定期对伺服行星减速机进行维护和检查,及时发现并解决可能存在的故障或问题,以降低噪音。
总之,伺服行星减速机产生噪音的原因是多方面的,可以通过采取一系列措施降低或消除噪音。在实际操作中,应根据 具体情况选择合适的方法来降低伺服行星减速机的噪音。
桂花乡PLFS120-50江苏弯头减速器
伺服行星减速箱是伺服系统中非常重要的一部分,它可以提供更低的转速和更大的扭矩,同时将电机的旋转运动转换为更复杂的线性运动。在使用伺服行星减速箱时,需要注意以下事项:
磨合期:伺服行星减速箱在安装和运行时需要进行磨合期。磨合期是指在规定的载荷和时间内,让减速箱逐渐适应工作状态,以防止过热或过早磨损。在磨合期间,应限制减速器的工作负荷不超过其额定工作负荷的85%,并安排合适的工作时间,避免减速器过热。同时,需要经常观察减速器的运行情况,如有异常应及时停止并排除故障。
润滑:伺服行星减速箱需要使用合适的润滑油进行润滑,以减少摩擦和磨损。润滑油的选择和更换需要根据减速箱的型号和使用条件进行选择和更换。一般来说,输入功率大的减速箱需要使用更高级别的润滑油,并且需要经常检查润滑油的质量和数量。
清洁:伺服行星减速箱需要保持清洁,避免灰尘、杂质和水分进入减速箱内部。在安装和拆卸过程中,应避免使用不合适的工具或方法,以免损坏减速箱内部零件。
紧固:伺服行星减速箱的各部分连接需要保持紧固,特别是输出轴和输入轴等关键部位。在运行过程中,如果发现有松动的现象,应立即停止并检查是否需要紧固。
维护:伺服行星减速箱需要定期进行维护检查,包括润滑油的更换、齿轮磨损的检查等。在维护过程中,应避免随意拆卸和调整内部零件,以免造成损坏或影响性能。
使用环境:伺服行星减速箱需要在合适的环境下工作,避免过高的温度、湿度、粉尘和冲击等恶劣环境条件的影响。如果必须在这些环境下工作,应采取相应的防护措施,如加装防护罩、提供清洁的工作环境等。
安全系数:在不同的应用场合下,需要选择合适的安全系数来保证伺服行星减速箱的正常使用。安全系数过小会导致行星减速箱过载或损坏,而安全系数过大则会造成浪费和不必要的成本。
总之,伺服行星减速箱在使用过程中需要注意许多事项。只有正确使用和保养,才能保证其长期稳定的工作,从而达到提高伺服系统性能和延长其使用寿命的目的。如果不注意这些事项,可能会导致减速箱过早磨损或损坏,影响整个伺服系统的性能和使用寿命。因此,在使用伺服行星减速箱时,必须严格遵守使用说明书中的各项注意事项,确保其正常运转和延长使用寿命。同时,对于一些特殊的使用环境或场合,还需要根据实际情况采取一些特殊的措施来保证其正常运转和使用寿命。
桂花乡PLFS120-50江苏弯头减速器
SPK 140S-MF1-3 -4 -5 -7 -10-1K1
SPK 140S-MF2-16 -20 -25 -28 -35 -40 -50 -70 -100-1K1
SPK 140S-MF1-3 -4 -5 -7 -10-1EO
SPK 140S-MF2-16 -20 -25 -28 -35 -40 -50 -70 -100-1EO
SPK 100S-MF1-3 -4 -5 -7 -10-1E1-2S
SPK 100S-MF2-16 -20 -25 -28 -35 -40 -50 -70 -100-1E1-2S
SPK 060S-MF1-3 -4 -5 -7 -10-1C1
SPK 060S-MF2-16 -20 -25 -28 -35 -40 -50 -70 -100-1C1
SPK 100S-MF1-3 -4 -5 -7 -10-1C1
SPK 100S-MF2-16 -20 -25 -28 -35 -40 -50 -70 -100-1C1
SPK 140S-MF1-3 -4 -5 -7 -10-2K1-2S
SPK 140S-MF2-16 -20 -25 -28 -35 -40 -50 -70 -100-2K1-2S
SPK 140S-MC1-3 -4 -5 -7 -10-1K1-2K
SPK 140S-MC2-16 -20 -25 -28 -35 -40 -50 -70 -100-1K1-2K
SPK 140S-MC1-3 -4 -5 -7 -10-1K1-2K
SPK 140S-MC2-16 -20 -25 -28 -35 -40 -50 -70 -100-1K1-2K
SPK 210S-MF1-3 -4 -5 -7 -10-0M1
SPK 210S-MF2-16 -20 -25 -28 -35 -40 -50 -70 -100-0M1
SPK 180S-MF1-3 -4 -5 -7 -10-0K1
SPK 180S-MF2-16 -20 -25 -28 -35 -40 -50 -70 -100-0K1
SPK 075S-MF1-3 -4 -5 -7 -10-0C1-2S
蠕变和蠕变误差:要求从两个方面检验传感器的蠕变误差:其一量蠕变:在5-1秒时间无冲击地加上额定负荷,在加荷后5~1秒读数,然后在3分钟内按一定的时间性间隔依次记下输出值。传感器蠕变(CP)按下式计算:CP=2-3/n1%。其二是蠕变恢复:尽快去掉额定负荷(在5~1秒时间内),卸荷后在5~1秒内立即读数,然后在3分钟内按一定的时间间隔依次记下输出值。传感器的蠕变恢复(CR)按下式计算:CR=5-6/n1%。
桂花乡PLFS120-50江苏弯头减速器





