北下关街道同轴减速机运转步骤图FPGA160-40耐用快速
工业上常用的减速机类型包括齿轮减速机、蜗杆减速机和行星减速机,以及它们互相组合起来的减速机。
齿轮减速机又分为单级圆柱齿轮减速机和双级圆柱齿轮减速机。单级圆柱齿轮减速机轴承常用滚动轴承,只有重载或特 高速时才用滑动轴承,适用于减速比3-5。轮齿可为直齿、斜齿或人字齿,箱体通常采用铸铁铸造,也可以用钢板焊起来 。双级圆柱齿轮减速机分有展开式、分流式、同轴式三种,适用减速比8-40。
微型摆线减速器是一种新型动力传输系统,其设计原理是基于一种新的减速原理和新开发的径向、轴向输出轴承。通过 采用差动式减速机构和薄型交叉滚子轴承,实现小体积的形状,为设备的尺寸紧凑作出贡献。并通过精密摆线齿轮和高 精度滚销的复数啮合,实现更高传动精度,同时保持了小尺寸和大速比。小体积、高刚性、低背隙等特点被广泛应用于 工业机器人关节。
谐波传动减速器通常由波发生器、柔轮、刚轮和柔性轴承等零部件构成,一般用于负荷比较小的工业机器人。谐波传动 减速器还具有显著的驱动优势,体积小,零部件少,单引擎50-4000%,传输效率92-96%。
行星减速机中的行星齿轮组是围绕太阳齿运转的,顾称之为行星减速机。机器人行星减速机可以通过与不同结构尺寸的 齿轮啮合来改变发展速度。电机与机器人减速器结合,增加扭矩。
建议根据自身需要选择合适的类型。

北下关街道同轴减速机运转步骤图FPGA160-40耐用快速
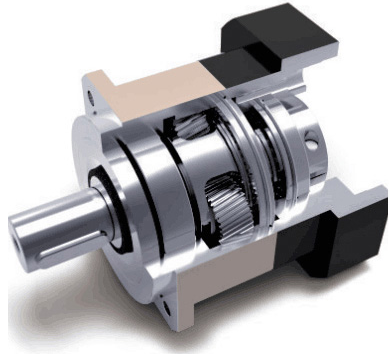
伺服行星减速机是一种精密的传动装置,它通过将电动机或其它动力源的旋转运动转化为更低的转速和更大的力矩,以满足各种工业应用的需求。它的结构和工作原理,通常涉及以下几个方面:
齿轮系统:伺服行星减速机主要利用齿轮系统进行动力传递和减速。它的齿轮系统通常包括一个太阳轮、一个或多个行星轮和一个大齿圈。动力从输入轴传入,驱动太阳轮,而行星轮在围绕太阳轮旋转的同时,也沿着自身的轴线旋转。大齿圈与行星轮相互啮合,从而将动力从行星轮传递到大齿圈,实现减速。
行星轮架:行星轮架是伺服行星减速机的重要部分,它支撑行星轮并使其能够自由旋转。行星轮架通常采用滚动轴承或滑动轴承,以减小摩擦和磨损。
润滑系统:伺服行星减速机通常配备有润滑系统,以保持其内部零件的良好运转状态。润滑系统可以将适量的润滑油持续供给到行星减速机的各个部分,如齿轮接触面、轴承等,以减小摩擦并防止金属表面的氧化。
密封件:伺服行星减速机的齿轮箱通常具有密封件,以防止润滑油泄漏。这些密封件通常由耐高温、耐磨材料制成,以保证其长期使用。
精度调整:伺服行星减速机的输出轴的位置和角度精度通常可以通过内部结构调整来控制。例如,可以调整行星轮的分布圆与大齿圈的齿顶圆之间的间隙,以改善输出轴的精度。
热处理和材料选择:伺服行星减速机的关键零件,如齿轮和轴承,通常需要经过热处理和选用特殊材料制造,以确保其强度、硬度和耐磨性。
防震和降噪:伺服行星减速机在运转过程中可能会产生震动和噪声。为了降低这些影响,设计师们通常会采取一系列措施,如优化齿轮设计、选用优质轴承和采用减震装置等。
过载保护:为了避免过载对伺服行星减速机造成损坏,它通常配备有过载保护装置。当扭矩超过预定值时,过载保护装置会触发停机,从而保护行星减速机不受损坏。
率:伺服行星减速机具有较高的效率,这是因为它的齿轮设计和润滑系统的优化设计减少了能量损失。
总的来说,伺服行星减速机以其率、高精度、低噪音、长寿命等特点,在各种工业领域中得到了广泛应用。然而,为了确保其长期稳定运行,必须对其进行正确的安装和维护,并注意使用过程中的注意事项。例如,需要定期检查润滑系统是否正常工作、各部件是否出现异常磨损或松动等。此外,按照制造商的建议进行正确的使用和调整也是非常重要的。

北下关街道同轴减速机运转步骤图FPGA160-40耐用快速
PGC050 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
PGC050 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
PGC060 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
PGC060 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
PGC070 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
PGC070 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
PGC090 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
PGC090 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
PGC120 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
PGC120 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
PGC155 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
PGC155 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
PGC205 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
PGC205 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
PGC50 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
PGC50 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
PGC70 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
PGC70 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
PGC90 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
PGC90 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
PGC60 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
PGC60 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
油管、气管、水管等中最粗的一根作为参考高度。加上至少百分之十的高度空间作为拖链的内高度。如果电缆油管、气管、水管等需要重叠时,按重叠后的实际高度作为参考高度。内宽:选择较粗的一根电缆;油管、气管、水管等其外径之和作为拖链内宽的参考并留至少百分之十以宽度空间。弯曲半径:选择内置电缆;油管、气管、水管等中的弯曲半径作为对考值,并留有百分之十以上的空间。拖链内如何放置:电缆、油管、气管、水管;应该留有百分之十到百分之十五的剩余空间让内置的电缆、油管、气管等可以自由活动;在弯曲半径中对拖链不会产生强拉力,能够保护电缆、油管或气管。
北下关街道同轴减速机运转步骤图FPGA160-40耐用快速






