内丘镇静音行星减速器PSN142-25络筒机
伺服行星减速机扭矩限制器的选择对于确保传动系统的稳定性和安全性至关重要。根据不同的应用需求和负载条件,扭 矩限制器的选择应基于以下因素进行考虑:
负载特性:首先,需要了解伺服行星减速机所承受的负载特性,包括静扭矩、动扭矩、冲击扭矩等。这些特性将决定所 选扭矩限制器的类型和规格。
精度要求:伺服行星减速机的精度通常较高,因此需要选择具有相应精度的扭矩限制器。例如,对于高精度传动系统, 应选择具有高分辨率和高稳定性的扭矩限制器。
环境条件:考虑伺服行星减速机所处的环境条件,如温度、湿度、粉尘等。这些因素可能对扭矩限制器的性能和使用寿 命产生影响,因此在选择时应尽量选择适应恶劣环境的扭矩限制器。
调整范围:根据应用需求,选择具有合适调整范围的扭矩限制器。例如,对于需要经常调整扭矩的场合,应选择具有宽 调整范围的扭矩限制器。
响应速度:根据传动系统的要求,选择具有合适响应速度的扭矩限制器。例如,对于需要快速响应的传动系统,应选择 具有快速响应速度的扭矩限制器。
品牌信誉:在选择伺服行星减速机扭矩限制器时,应考虑品牌信誉和售后服务。选择具有良好品牌信誉和售后服务的扭 矩限制器,可以保证其质量和性能的可靠性,同时也能获得更好的技术支持和服务。
认证标准:了解所选扭矩限制器是否通过相关的认证标准,如ISO认证、CE认证等。这些认证标准可以证明该产品具有符 合规范的质量和性能水平。
附加功能:根据实际应用需求,考虑所选扭矩限制器是否具备其他附加功能,如过载保护、温度补偿等。这些附加功能 可以提高系统的安全性和稳定性。
安装方式:根据伺服行星减速机的安装方式,选择合适的扭矩限制器安装方式。例如,有些扭矩限制器可能采用轴向安 装方式,而有些则采用径向安装方式。
尺寸和重量:考虑所选扭矩限制器的尺寸和重量,以确保其能够适应特定的空间和重量限制。过大的尺寸和重量可能会 增加系统的复杂性和成本。
综上所述,选择合适的伺服行星减速机扭矩限制器需要考虑多种因素。在选择过程中,应对各种因素进行综合权衡和分 析,以选择特定应用需求的扭矩限制器。此外,在购买和使用过程中,还应仔细阅读产品说明书和相关技术文档 ,以确保正确安装和使用所选的扭矩限制器。

内丘镇静音行星减速器PSN142-25络筒机
行星减速机在动力系统中起到的具体作用主要是降低转速和增大机械转矩。
在行星减速机中,输入轴的转速被减速并传递到输出轴,从而降低了输出轴的转速。同时,由于行星减速机的齿轮设计,使得输入轴的扭矩被放大,从而得到更大的输出轴扭矩。这种增大扭矩的作用对于许多需要较大驱动力的应用来说非常重要,例如在机器人、自动化设备、重型机械等需要强大扭矩的动力系统中。
总的来说,行星减速机的作用是转化和调整动力,使得动力系统能够满足设备在速度和力量方面的需求。
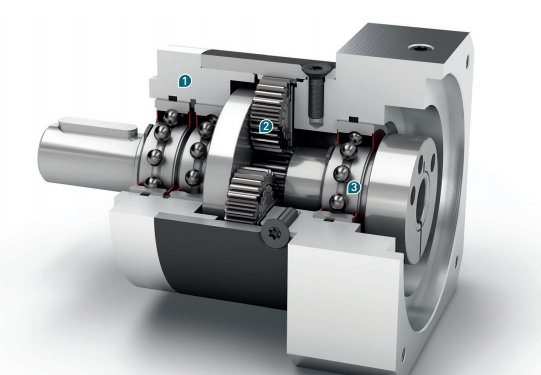
行星减速机通过其内部的多级齿轮传动机构降低输出轴的转速。具体来说,行星减速机中的太阳轮、行星轮和内齿环等部件组成了多级齿轮传动机构。
当行星减速机的输入轴转动时,太阳轮随之转动,并将动力传递给行星轮。行星轮通过与内齿环的配合,将动力传递到输出轴上。由于太阳轮和行星轮的齿轮比设计,使得行星减速机的输出轴转速降低到满足设备需求的转速。
通过调整行星轮的齿轮比,可以改变行星减速机的减速比,以满足不同设备的动力需求。同时,行星减速机的设计精度和齿轮加工精度对于降低输出轴的转速和提高传动效率也是非常重要的。
内丘镇静音行星减速器PSN142-25络筒机
PGR060 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
PGR060 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
PGR060 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
PGR090 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
PGR090 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
PGR090 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
PGR115 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
PGR115 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
PGR115 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
PGR142 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
PGR142 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
PGR142 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
PGR120 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
PGR120 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
PGR120 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
PGR60 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
PGR60 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
PGR60 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
PGR90 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
PGR90 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
PGR90 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
虚拟现实技术和人机工程的结合应用,具体表现在以下几个方面:1)在设计阶段,应用虚拟现实技术对人机工程设计中的产品设计和环境设计等进行仿真和评估。主要体现在工作空间测试与评估、布局设计的要求、人机界面设计、环境工效评估等方面;在制造阶段,应用虚拟现实技术对产品零件的加工和装配过程进行模拟和分析,对加工工艺和装配过程的人机工程问题进行评估和改进。如通过加工过程的模拟,对工装的人机因素进行评估等;在使用、维修、报废等阶段,利用虚拟现实技术对产品的运行、使用、维修、报废等各生命周期阶段的状况进行模拟,提高产品整个生命周期的人机性能。
内丘镇静音行星减速器PSN142-25络筒机






