洞口乡安全创新AE090-007高转速行星齿轮减速机

伊明传动科技(厦门)有限公司
中国 厦门
产品属性
图文详情
品牌推荐
品牌
EAMON/伊明牌
型号
AB-AD-AE-PLF-PLE-SP-LP
类型
行星齿轮减速器
载荷状态
均匀载荷
传动比级数
多级
轴的相对位置
立式加速器
传动布置形式
同轴式
加工定制
加工定制
样品或现货
现货
齿面硬度
硬齿面
减速比
3-100
输出转速范围
3000-8000rpm
输入转速
3000r/min
额定功率
50-3500kw
许用扭矩
10-1200N.m
使用范围
伺服电机,步进马达,异步电机
外形尺寸
42-330mm
重量
1-50kg
一段速比
3-10
二段速比
12-100
三段速比
60-1000
背隙
3-10弧分
法兰大小
42-330mm
洞口乡安全创新AE090-007高转速行星齿轮减速机
伺服行星减速机的输入转速是根据其设计参数和性能要求进行计算的。具体来说,输入转速主要受到以下几个 因素的影响:
减速比:伺服行星减速机的减速比是输入转速与输出转速之间的比例关系。减速比的大小决定了输入转速的值。一 般来说,减速比越大,输入转速越小。因此,在满足输出转速要求的前提下,可以选择较小的减速比来提高输入转速的 值。
功率:伺服行星减速机的输入转速受到其承受功率的限制。功率越大,允许输入的转速越高。在选择伺服行星减速 机时,需要根据实际需求选择合适的功率,以确保在满足负载要求的同时,能够承受较高的输入转速。
轴承和齿轮设计:伺服行星减速机的轴承和齿轮设计对其输入转速也有影响。一般来说,采用滚动轴承、齿数较少 的齿轮以及较大的齿轮模数可以承受更高的输入转速。因此,在选择伺服行星减速机时,需要考虑其轴承和齿轮设计是 否符合输入转速的要求。
负载特性:伺服行星减速机的负载特性对其输入转速也有影响。例如,对于静扭矩负载较大的情况,需要选择较大 的减速比和较高的功率来满足要求,从而降低输入转速的值。而对于动扭矩负载较大的情况,需要选择具有更高疲 劳强度的轴承和齿轮设计,以承受较高的输入转速。
综上所述,伺服行星减速机的输入转速是根据其设计参数、性能要求以及负载特性等因素进行计算的。在选择伺服 行星减速机时,需要根据实际需求综合考虑以上因素,以确定合适的输入转速。
洞口乡安全创新AE090-007高转速行星齿轮减速机
转角行星减速机是一种高精密度、高扭矩传动装置,它具有一些明显的优点和缺点。
优点方面,转角行星减速机的主要优点包括率、高精密度、大扭矩、计划性和长寿命以及紧凑。
率:转角行星减速机具有较高的传动效率,能够有效地将输入功率转化为输出功率,从而提高整个系统的效率。
高精密度:由于采用了精密的齿轮设计和制造工艺,转角行星减速机的精密度很高,能够保证高精度应用中的选择。
大扭矩:转角行星减速机的设计使其能够提供高扭矩输出,能够在承受大装载的应用中表现出色,这也是其被广泛应用于机器人、设备和机床等高要求领域的原因之一。
计划性和长寿命:转角行星减速机采用平衡分布式重载和热分布设计,使其寿命更长,并且容易计划和预测维护时间,这也就意味着更长的使用寿命和更少的维修。
紧凑:由于齿轮是内齿形式,转角行星减速机整体尺寸紧凑,这使得它非常适合于空间限制严格的应用。
然而,转角行星减速机也存在一些缺点,主要表现在成本、噪音和维护方面。
成本:转角行星减速机的制造难度大,生产成本较高,相对于其他类型的减速机略贵。
噪音:虽然转角行星减速机在高转速时可能会有一定噪音,但相对其他类型的减速器来说,它的噪音还是较低的。
维护:由于内部齿轮设计复杂,分解和维护比其他类型的减速器困难,这也给维护带来了一定的挑战。
重量:由于内部构造和精密度高,相对于其他类型的减速机,转角行星减速机体积和重量较大,但相应地能够承受相对较大的负载。
总的来说,转角行星减速机的优点和缺点并存,虽然有一些缺点,但是其率和扭矩大等优点还是使其在许多高要求领域中被广泛应用。

洞口乡安全创新AE090-007高转速行星齿轮减速机
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-38KA35
VRB-140-28-30-35-40-50-60-70-80-100-K3-38KA35
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-28HA22
VRB-140-28-30-35-40-50-60-70-80-100-K3-28HA22
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-28HA24
VRB-140-28-30-35-40-50-60-70-80-100-K3-28HA24
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-48KA42
VRB-140-28-30-35-40-50-60-70-80-100-K3-48KA42
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-28HB22
VRB-140-28-30-35-40-50-60-70-80-100-K3-28HB22
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-28HF22
VRB-140-28-30-35-40-50-60-70-80-100-K3-28HF22
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-38JA32
VRB-140-28-30-35-40-50-60-70-80-100-K3-38JA32
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-28FE24
VRB-140-28-30-35-40-50-60-70-80-100-K3-28FE24
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-28HA28
VRB-140-28-30-35-40-50-60-70-80-100-K3-28HA28
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-28HF24
VRB-140-28-30-35-40-50-60-70-80-100-K3-28HF24
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-38MB35
VRB-140-28-30-35-40-50-60-70-80-100-K3-38MB35
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-19DC19
VRB-140-28-30-35-40-50-60-70-80-100-K3-19DC19
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-28HB24
VRB-140-28-30-35-40-50-60-70-80-100-K3-28HB24
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-19EC16
VRB-140-28-30-35-40-50-60-70-80-100-K3-19EC16
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-19FB19
VRB-140-28-30-35-40-50-60-70-80-100-K3-19FB19
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-19HB19
VRB-140-28-30-35-40-50-60-70-80-100-K3-19HB19
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-19DB19
VRB-140-28-30-35-40-50-60-70-80-100-K3-19DB19
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-19DD19
VRB-140-28-30-35-40-50-60-70-80-100-K3-19DD19
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-48MB42
VRB-140-28-30-35-40-50-60-70-80-100-K3-48MB42

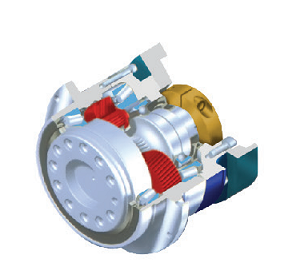
因此其轮廓形状为滚子沿滚子中心运动轨迹形成的外包络线。要求得中心轮的齿廓,就要先求滚子轨迹的曲线方程。对于滚子沿轨迹产生的包络线是以理论轨迹为中心,滚子半径和激波器半径的关系与外摆线不同,不存在整数倍关系,这有利于更加灵活地设计减速器,便于减小减速器的重量和体积。滚柱随活齿架的转动的转角呈周期性变化,在一个周期中,相对速度由小变大、由大变小、由小变大、再由大变小四次变化,出现了两个极大值和一个极小值。
洞口乡安全创新AE090-007高转速行星齿轮减速机
伺服行星减速机的输入转速是根据其设计参数和性能要求进行计算的。具体来说,输入转速主要受到以下几个 因素的影响:
减速比:伺服行星减速机的减速比是输入转速与输出转速之间的比例关系。减速比的大小决定了输入转速的值。一 般来说,减速比越大,输入转速越小。因此,在满足输出转速要求的前提下,可以选择较小的减速比来提高输入转速的 值。
功率:伺服行星减速机的输入转速受到其承受功率的限制。功率越大,允许输入的转速越高。在选择伺服行星减速 机时,需要根据实际需求选择合适的功率,以确保在满足负载要求的同时,能够承受较高的输入转速。
轴承和齿轮设计:伺服行星减速机的轴承和齿轮设计对其输入转速也有影响。一般来说,采用滚动轴承、齿数较少 的齿轮以及较大的齿轮模数可以承受更高的输入转速。因此,在选择伺服行星减速机时,需要考虑其轴承和齿轮设计是 否符合输入转速的要求。
负载特性:伺服行星减速机的负载特性对其输入转速也有影响。例如,对于静扭矩负载较大的情况,需要选择较大 的减速比和较高的功率来满足要求,从而降低输入转速的值。而对于动扭矩负载较大的情况,需要选择具有更高疲 劳强度的轴承和齿轮设计,以承受较高的输入转速。
综上所述,伺服行星减速机的输入转速是根据其设计参数、性能要求以及负载特性等因素进行计算的。在选择伺服 行星减速机时,需要根据实际需求综合考虑以上因素,以确定合适的输入转速。
洞口乡安全创新AE090-007高转速行星齿轮减速机
转角行星减速机是一种高精密度、高扭矩传动装置,它具有一些明显的优点和缺点。
优点方面,转角行星减速机的主要优点包括率、高精密度、大扭矩、计划性和长寿命以及紧凑。
率:转角行星减速机具有较高的传动效率,能够有效地将输入功率转化为输出功率,从而提高整个系统的效率。
高精密度:由于采用了精密的齿轮设计和制造工艺,转角行星减速机的精密度很高,能够保证高精度应用中的选择。
大扭矩:转角行星减速机的设计使其能够提供高扭矩输出,能够在承受大装载的应用中表现出色,这也是其被广泛应用于机器人、设备和机床等高要求领域的原因之一。
计划性和长寿命:转角行星减速机采用平衡分布式重载和热分布设计,使其寿命更长,并且容易计划和预测维护时间,这也就意味着更长的使用寿命和更少的维修。
紧凑:由于齿轮是内齿形式,转角行星减速机整体尺寸紧凑,这使得它非常适合于空间限制严格的应用。
然而,转角行星减速机也存在一些缺点,主要表现在成本、噪音和维护方面。
成本:转角行星减速机的制造难度大,生产成本较高,相对于其他类型的减速机略贵。
噪音:虽然转角行星减速机在高转速时可能会有一定噪音,但相对其他类型的减速器来说,它的噪音还是较低的。
维护:由于内部齿轮设计复杂,分解和维护比其他类型的减速器困难,这也给维护带来了一定的挑战。
重量:由于内部构造和精密度高,相对于其他类型的减速机,转角行星减速机体积和重量较大,但相应地能够承受相对较大的负载。
总的来说,转角行星减速机的优点和缺点并存,虽然有一些缺点,但是其率和扭矩大等优点还是使其在许多高要求领域中被广泛应用。
洞口乡安全创新AE090-007高转速行星齿轮减速机
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-38KA35
VRB-140-28-30-35-40-50-60-70-80-100-K3-38KA35
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-28HA22
VRB-140-28-30-35-40-50-60-70-80-100-K3-28HA22
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-28HA24
VRB-140-28-30-35-40-50-60-70-80-100-K3-28HA24
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-48KA42
VRB-140-28-30-35-40-50-60-70-80-100-K3-48KA42
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-28HB22
VRB-140-28-30-35-40-50-60-70-80-100-K3-28HB22
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-28HF22
VRB-140-28-30-35-40-50-60-70-80-100-K3-28HF22
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-38JA32
VRB-140-28-30-35-40-50-60-70-80-100-K3-38JA32
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-28FE24
VRB-140-28-30-35-40-50-60-70-80-100-K3-28FE24
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-28HA28
VRB-140-28-30-35-40-50-60-70-80-100-K3-28HA28
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-28HF24
VRB-140-28-30-35-40-50-60-70-80-100-K3-28HF24
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-38MB35
VRB-140-28-30-35-40-50-60-70-80-100-K3-38MB35
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-19DC19
VRB-140-28-30-35-40-50-60-70-80-100-K3-19DC19
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-28HB24
VRB-140-28-30-35-40-50-60-70-80-100-K3-28HB24
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-19EC16
VRB-140-28-30-35-40-50-60-70-80-100-K3-19EC16
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-19FB19
VRB-140-28-30-35-40-50-60-70-80-100-K3-19FB19
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-19HB19
VRB-140-28-30-35-40-50-60-70-80-100-K3-19HB19
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-19DB19
VRB-140-28-30-35-40-50-60-70-80-100-K3-19DB19
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-19DD19
VRB-140-28-30-35-40-50-60-70-80-100-K3-19DD19
VRB-140-3-4-5-6-7-8-10-15-16-20-25-K3-48MB42
VRB-140-28-30-35-40-50-60-70-80-100-K3-48MB42
因此其轮廓形状为滚子沿滚子中心运动轨迹形成的外包络线。要求得中心轮的齿廓,就要先求滚子轨迹的曲线方程。对于滚子沿轨迹产生的包络线是以理论轨迹为中心,滚子半径和激波器半径的关系与外摆线不同,不存在整数倍关系,这有利于更加灵活地设计减速器,便于减小减速器的重量和体积。滚柱随活齿架的转动的转角呈周期性变化,在一个周期中,相对速度由小变大、由大变小、由小变大、再由大变小四次变化,出现了两个极大值和一个极小值。
洞口乡安全创新AE090-007高转速行星齿轮减速机





