西区街道MKB-140-35-K3-28HA22攻丝机
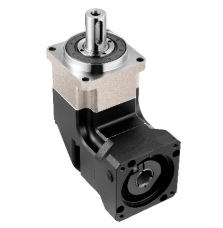
EAMON/伊明牌HDR系列直角行星减速机
法兰外径:180mm
减速机机型:HD(平行轴斜齿精密型)
减速机体型:R(90°直角输出,直角型)
减速比:单段=3-20;双段=15-200
出力轴键槽:S(标准品,带键槽)、S1(实心轴,无键槽)、T(特殊)
背隙等级:单段:P0≤1,P1≤3,P2≤5;双段:P0≤3,P1≤5,P2≤7
西区街道MKB-140-35-K3-28HA22攻丝机
单从外观,我们是无法区分PLC输出的类型的。一般是从型号上区分,PLC的型号上一般都有表示输出特性的字母。R是英文Relay的缩写,表示继电器输出,可接交直流负载T是英文Transistor的缩写,表示晶体管输出,只能接直流负载S是英文Silicon的缩写,表示晶闸管输出,只能接交流负载比如图一中PLC的型号是K7M-DRT20U,字母RT就是表示输出的字母。它表示此PLC是继电器和晶体管混合输出的。

西区街道MKB-140-35-K3-28HA22攻丝机
PZF060 -L1 -3 4 5 7 10 -S2-P2
PZF060 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
PZF080 -L1 -3 4 5 7 10 -S2-P2
PZF080 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
PZF090 -L1 -3 4 5 7 10 -S2-P2
PZF090 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
PZF120 -L1 -3 4 5 7 10 -S2-P2
PZF120 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
PZF160 -L1 -3 4 5 7 10 -S2-P2
PZF160 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
PZF115 -L1 -3 4 5 7 10 -S2-P2
PZF115 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
PZF142 -L1 -3 4 5 7 10 -S2-P2
PZF142 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
PZF60 -L1 -3 4 5 7 10 -S2-P2
PZF60 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
PZF80 -L1 -3 4 5 7 10 -S2-P2
PZF80 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
PZF90 -L1 -3 4 5 7 10 -S2-P2
PZF90 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2

只有在执行该POU时,定义的临时变量才被使用,POU执行完后,不再保存临时变量的数值。2)IN是由调用它的POU提供的输入参数。3)OUT是返回给调用它的POU的输出参数(子程序的执行结果)。4)IN_OUT是输入_输出参数,其初始值由调用它的POU传送给子程序,并用同一变量将子程序的执行结果返回给调用它的POU。主程序和中断程序的局部变量中只有临时变量TEMP。具有输入、输出参数和局部变量的子程序易于实现结构化编程,对于长期生产同类设备或生产线的厂家尤为有用。
西区街道MKB-140-35-K3-28HA22攻丝机






