沙头镇科比电机减速机SEL-62A-40-P1智能稳定
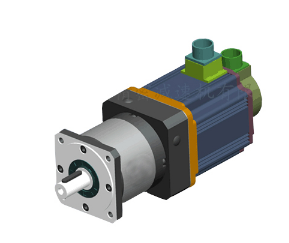
EAMON/伊明牌减速机产品特点:
采用笼式行星架与输出轴一体化,两端轴承支撑,实现更高刚度与精度。
齿轮材料选用高级低碳合金钢,经过渗碳淬火达到HRC60左右,使用超精密机床加工,控制齿轮精度在ISO5级以下,确保减速机、长寿命。
减速机采用螺旋斜齿轮传动,其齿形重合度达到2.5以上,具有运转平稳、低噪音、大扭矩和低侧隙特性。
采用重系列轴承,能承受大的径向与轴向力。
行星轮轴承采用不含保持架之满滚针轴承,增大减速机输出扭矩和刚性。
利用专业齿轮技术,对齿面进行齿形与齿向修正,降低齿轮啮合冲击与噪音。
筒式锁紧机构经过动平衡,确保在高输入转速下保证同心度和零侧隙动力传动。
使用合成润滑脂,并采用IP65防护等级的密封设计,不泄露免维护。

沙头镇科比电机减速机SEL-62A-40-P1智能稳定
电动机失步会影响数控系统的稳定性和控制精度,造成数控机床加工精度下降。转子的加速度慢子步进电动机的旋转磁场转子的力n速度慢于步进电动机的旋转磁场,即低于换相速度时,步进电动机会产生失步。这是因为输入电动机的电能不足,在步进电动机中产生的同步力矩无法使转子速度跟随定子磁场的旋转速度,从而引起失步。由于步进电动机的动态输出转矩随着连续运行频率的上升而降低,因而,凡是比该频率高的工作频率都将产生丢步。这种失步说明步进电动机的转矩不足,拖动能力不够。
沙头镇科比电机减速机SEL-62A-40-P1智能稳定
VRB-060B-3-K5-S8ZH8
VRB-060B-4-K5-S8ZH8
VRB-060B-5-K5-S8ZH8
VRB-060B-6-K5-S8ZH8
VRB-060B-7-K5-S8ZH8
VRB-060B-8-K5-S8ZH8
VRB-060B-9-K5-S8ZH8
VRB-060B-10-K5-S8ZH8
VRB-060B-15-K5-S8ZH8
VRB-060B-16-K5-S8ZH8
VRB-060B-20-K5-S8ZH8
VRB-060B-25-K5-S8ZH8
VRB-060B-28-K5-S8ZH8
VRB-060B-30-K5-S8ZH8
VRB-060B-35-K5-S8ZH8
VRB-060B-40-K5-S8ZH8
VRB-060B-45-K5-S8ZH8
VRB-060B-50-K5-S8ZH8
VRB-060B-60-K5-S8ZH8
VRB-060B-70-K5-S8ZH8
VRB-060B-80-K5-S8ZH8
VRB-060B-90-K5-S8ZH8
VRB-060B-100-K5-S8ZH8
VRB-060B-3-K5-14DG14
VRB-060B-4-K5-14DG14
VRB-060B-5-K5-14DG14
VRB-060B-6-K5-14DG14
VRB-060B-7-K5-14DG14
VRB-060B-8-K5-14DG14
VRB-060B-9-K5-14DG14
VRB-060B-10-K5-14DG14
VRB-060B-15-K5-14DG14
VRB-060B-16-K5-14DG14
VRB-060B-20-K5-14DG14
VRB-060B-25-K5-14DG14
VRB-060B-28-K5-14DG14
VRB-060B-30-K5-14DG14
VRB-060B-35-K5-14DG14
VRB-060B-40-K5-14DG14
VRB-060B-45-K5-14DG14
VRB-060B-50-K5-14DG14
VRB-060B-60-K5-14DG14
VRB-060B-70-K5-14DG14
VRB-060B-80-K5-14DG14
VRB-060B-90-K5-14DG14
VRB-060B-100-K5-14DG14

提供了数据流通信,但并不将数据封装成消息块,因而用户并不接收到每一个任务的确认信号。TCP支持面向TCP/IP的Socket。TCP支持给予TCP/IP的发送和接收,使得设备(PC或非西门子设备)在工业以太网上的通信非常容易。该协议支持大数据量的数据传输(8KB),数据可以通过工业以太网或TCP/IP网络(拨号网络或因特网)传输。通过TCP,SIMATICS7可以通过建立TCP连接来发送/接收数据。
沙头镇科比电机减速机SEL-62A-40-P1智能稳定






