沙坪镇强钢性伺服变速箱PB142-6-P1机械手减速机什么不同标准
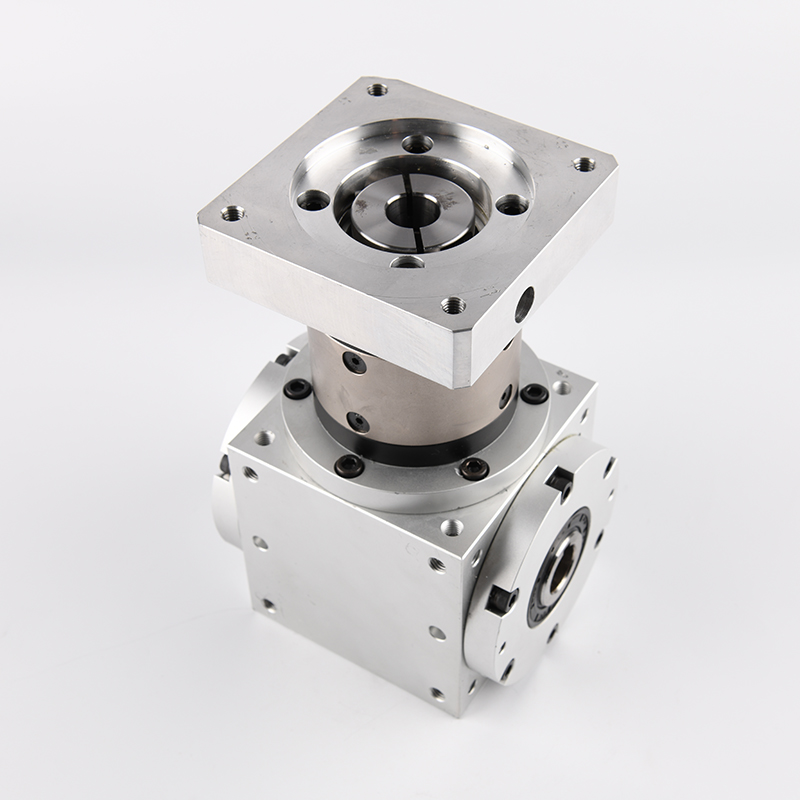
EAMON/伊明牌PF60系列精密行星减速机
精密直齿型、单悬臂结构;
方法兰输出、通孔连接;
安装尺寸标准化、通用性强;
应用范围广、极具性价比;
适配电机功率:100W、400W、750W伺服电机,57、60、86步进电机等
适用于任何厂商所制造的驱动产品连接,如:松下、安川、三菱、富士、三洋、发那科、西门子、施耐德、科尔摩根、东元、台达、汇川、禾川、信捷等交流伺服电机、直流伺服电机、步进电机的减速传动。

沙坪镇强钢性伺服变速箱PB142-6-P1机械手减速机什么不同标准
我们以51单片机为例。51中一般针对串口通讯编程,通常采取中断接受查询发送的方式。中断函数在接受数据到达时被重复调用,其实是个重复入栈的过程,所以不宜将函数写的太长,函数太长一般会导致栈太深占用系统资源,二是处理时间过长,可能导致通讯出错。为了防止在处理数据过程中不受干扰,通常在处理接受数据前关闭中断,处理完后再开。通常的的编程方式如下:STaticvoidUartInterruptService(void)interrupt4{ES=0;RI=0;uart_process(SBUF);ES=1;}下面重点介绍数据处理函数uart_process(SBUF);其实很多时候,对于通讯传输的数据处理才是关键,尤其对于设计通讯协议而言。
沙坪镇强钢性伺服变速箱PB142-6-P1机械手减速机什么不同标准
VRB-060-3-K5-14BM11
VRB-060-4-K5-14BM11
VRB-060-5-K5-14BM11
VRB-060-6-K5-14BM11
VRB-060-7-K5-14BM11
VRB-060-8-K5-14BM11
VRB-060-9-K5-14BM11
VRB-060-10-K5-14BM11
VRB-060-15-K5-14BM11
VRB-060-16-K5-14BM11
VRB-060-20-K5-14BM11
VRB-060-25-K5-14BM11
VRB-060-28-K5-14BM11
VRB-060-30-K5-14BM11
VRB-060-35-K5-14BM11
VRB-060-40-K5-14BM11
VRB-060-45-K5-14BM11
VRB-060-50-K5-14BM11
VRB-060-60-K5-14BM11
VRB-060-70-K5-14BM11
VRB-060-80-K5-14BM11
VRB-060-90-K5-14BM11
VRB-060-100-K5-14BM11
VRB-060-3-K5-14BJ11
VRB-060-4-K5-14BJ11
VRB-060-5-K5-14BJ11
VRB-060-6-K5-14BJ11
VRB-060-7-K5-14BJ11
VRB-060-8-K5-14BJ11
VRB-060-9-K5-14BJ11
VRB-060-10-K5-14BJ11
VRB-060-15-K5-14BJ11
VRB-060-16-K5-14BJ11
VRB-060-20-K5-14BJ11
VRB-060-25-K5-14BJ11
VRB-060-28-K5-14BJ11
VRB-060-30-K5-14BJ11
VRB-060-35-K5-14BJ11
VRB-060-40-K5-14BJ11
VRB-060-45-K5-14BJ11
VRB-060-50-K5-14BJ11
VRB-060-60-K5-14BJ11
VRB-060-70-K5-14BJ11
VRB-060-80-K5-14BJ11
VRB-060-90-K5-14BJ11
VRB-060-100-K5-14BJ11

在有刷电机中,将各组线圈排成一个圆环形,相互之间又用绝缘材料隔开,形成一个圆柱形与电机轴连成一体,电源通过两个碳刷,在弹簧的压力下压在线圈上,每组线圈转动到碳刷下面就能给这组线圈通电。随着电机转动,给不同线圈或同一线圈不同两级通电,使线圈产生磁场两极与靠近永磁铁定子的两极有一个角度,通过同极相斥和异极相吸产生力量,推动电机转动。有刷电机与无刷电机的区别除了碳刷外,有刷电机是利用齿轮来进行控制,这就会让电机的返修率增加了;而无刷电机就不需要用齿轮,不会经常维修,使用寿命就会高一些,可靠性也比较高,不过无刷电机的控制系统成本也会相对有刷电机高;此外有刷电机的噪音比较大,而无刷电机声音小得多,工作效率也会高一些。
沙坪镇强钢性伺服变速箱PB142-6-P1机械手减速机什么不同标准






