乐土镇MKB-140-7-K3-48KA42机器人伺服齿轮减速器
EAMON/伊明牌HDF系列圆法兰行星减速机
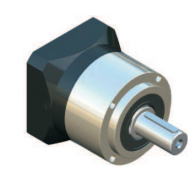
规格:标准型
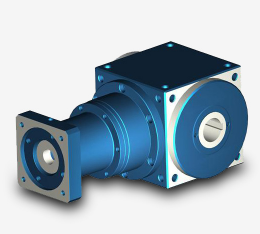
减速机型:HD(平行轴斜齿精密型)
框号:60、90、120、140、180、220
减速比:单段=3-10;双段=15-100
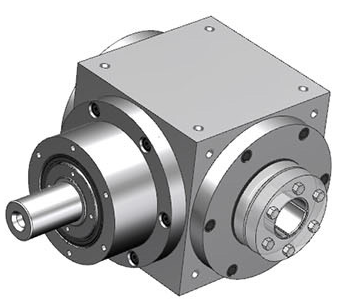
乐土镇MKB-140-7-K3-48KA42机器人伺服齿轮减速器
力矩=力*半径力矩与电机有效体积*安匝数*磁密成正比(只考虑线性状态)电机有效体积越大,励磁安匝数越大,定转子间气隙越小,电机力矩越大,反之亦然。四相反应式步进电机工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。是该四相反应式步进电机工作原理示意图。开始时,开关SB接通电源,SSSD断开,B相磁极和转子0、3号齿对齐,同时,转子的4号齿就和D相绕组磁极产生错齿,5号齿就和A相绕组磁极产生错齿。
乐土镇MKB-140-7-K3-48KA42机器人伺服齿轮减速器
NF090-L1-3-S2-P2
NF090-L1-4-S2-P2
NF090-L1-5-S2-P2
NF090-L1-6-S2-P2
NF090-L1-7-S2-P2
NF090-L1-8-S2-P2
NF090-L1-10-S2-P2
NF090-L2-12-S2-P2
NF090-L2-15-S2-P2
NF090-L2-16-S2-P2
NF090-L2-20-S2-P2
NF090-L2-25-S2-P2
NF090-L2-28-S2-P2
NF090-L2-30-S2-P2
NF090-L2-35-S2-P2
NF090-L2-40-S2-P2
NF090-L2-50-S2-P2
NF090-L2-70-S2-P2
NF090-L2-100-S2-P2
NF115-L1-3-S2-P2
NF115-L1-4-S2-P2
NF115-L1-5-S2-P2
NF115-L1-6-S2-P2
NF115-L1-7-S2-P2
NF115-L1-8-S2-P2
NF115-L1-10-S2-P2
NF115-L2-12-S2-P2
NF115-L2-15-S2-P2
NF115-L2-16-S2-P2
NF115-L2-20-S2-P2
NF115-L2-25-S2-P2
NF115-L2-28-S2-P2
NF115-L2-30-S2-P2
NF115-L2-35-S2-P2
NF115-L2-40-S2-P2
NF115-L2-50-S2-P2
NF115-L2-70-S2-P2
NF115-L2-100-S2-P2
如所示:图3参数设置注意事项:如果采用TCP/IP协议通讯方式,必须启动“正在使用IP协议”,将组态好的硬件到CPU,则PLC设置完成了。设置安装WINN(通常为工程师站ES和操作员站OS)计算机Windows操作系统的TCP/IP参数,将WINN组态计算机的IP地址设置成为与PLC以太网通讯模块或者PN接口地址保持在一个网段内。如所示:设置计算机IP地址5.添加新的驱动程序和设置系统参数,打开新创建的工程“test”,在项目管理栏里选择“变量管理”,单击右键选择“添加新的驱动程序”,如所示。
乐土镇MKB-140-7-K3-48KA42机器人伺服齿轮减速器






