源潭镇行星减速器模型SB-62A-25-P1昆山精密行星减速机
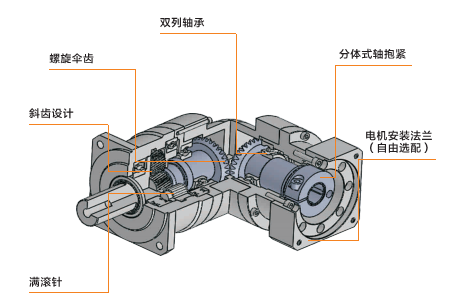
EAMON/伊明牌JD高精密斜齿轮减速机:
一、全一体化设计,精度提高到大化。
二、双支撑笼式行星架结构,拥有高可靠度,可适应频繁正反转。
三、斜齿传动,传动更平稳,更大的承载能力。
四、低回程间隙,更。
五、特殊转架结构,可以承载更大的径向力和轴向力。
规格范围:42-120。速比范围:3-100。精度范围:1-3arcmin(p1等级)、3-5arcmin(p2等级)

源潭镇行星减速器模型SB-62A-25-P1昆山精密行星减速机
用高中学过的直线方程两点式就可以了。已知两点(4,20)和(20,50),求(x,y)。线性变换用到的指令模块.标准化(NORM_X)指令:可以使用“标准化”指令,通过将输入VALUE中变量的值映射到线性标尺对其进行标准化。可以使用参数MIN和MAX定义(应用于该标尺的)值范围的限值。输出OUT中的结果经过计算并存储为浮点数,这取决于要标准化的值在该值范围中的位置。如果要标准化的值等于输入MIN中的值,则输出OUT将返回值“0.0”。
源潭镇行星减速器模型SB-62A-25-P1昆山精密行星减速机
PZF060 -L1 -3 4 5 7 10 -S2-P2
PZF060 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
PZF080 -L1 -3 4 5 7 10 -S2-P2
PZF080 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
PZF090 -L1 -3 4 5 7 10 -S2-P2
PZF090 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
PZF120 -L1 -3 4 5 7 10 -S2-P2
PZF120 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
PZF160 -L1 -3 4 5 7 10 -S2-P2
PZF160 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
PZF115 -L1 -3 4 5 7 10 -S2-P2
PZF115 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
PZF142 -L1 -3 4 5 7 10 -S2-P2
PZF142 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
PZF60 -L1 -3 4 5 7 10 -S2-P2
PZF60 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
PZF80 -L1 -3 4 5 7 10 -S2-P2
PZF80 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
PZF90 -L1 -3 4 5 7 10 -S2-P2
PZF90 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2

了解这些以后,再下一步我们就开始了解西门子plc的寻址方式,因为对西门子来讲,主要讲的是它的寻址方式,只有了解寻址,才能后续存储器的学习,:字节,字,双字这些数据是怎样寻址的,它们之间是怎样的关系,通过寻址我们具体要做什么,寻址有什么优点等等。这些内容呢只要我们结合老师所演示的和书本的学习,相信一周之内就可以掌握。第三就开始软件的应用及基本逻辑指令这两大块的学习,首先我们要了解软件里面各部分的功能,先把软件最常用的一些功能学习一下,如怎么给PLC程序,程序块,系统块及数据块等等是用来做什么用的,了解这些后,我们就可以开始一些简单指令的学习,编写一些简单的程序到PLC里面进行试验,其实指令的学习很简单,不需要我们去死记硬背,大家用哪学哪,只要知道它怎么用,在忘了的时候只要查找手册马上就能想起来怎么用就可以了,如果不理解指令的用法呢可以按键盘F1键查看帮助,如果还是不理解,可以到PLC里面看它实际的一个动作功能是怎样的,这样去学习指令是不是就简单更快了呢。
源潭镇行星减速器模型SB-62A-25-P1昆山精密行星减速机






