永兴镇KSE120-40-P2械捆扎机用行星减速机
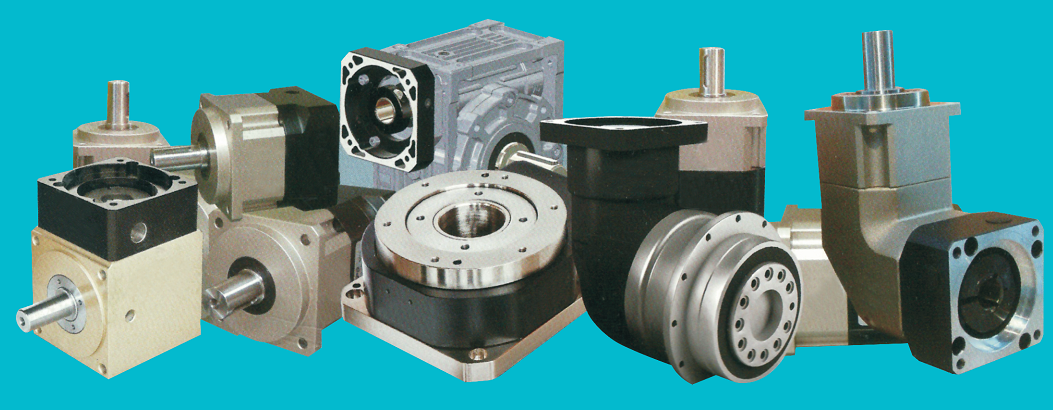
EAMON/伊明牌TDR系列行星减速机
● 低噪音:采用螺旋齿轮设计,实现了减速机的顺畅、安静运转。
● 高精度背隙可达3弧分以内,。
● 高刚性、高扭矩输出轴采用大尺寸,大跨距式双支撑轴承设计,大大提高了减速机刚性和扭矩。
● 率:单段可达95%以上,双段可达92%以上。
● 免维护:油脂磨耗低,可终身润滑。
● 密封效果好:润滑油脂具有高粘度、不易分离的特性,并采用IP65防护等级,确保无润滑油脂泄漏。
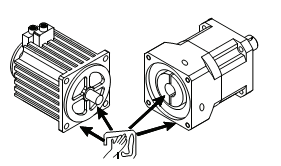
● 自由安装:可任意安装减速机。
● 适用性广;适用于任意型式伺服电机。

永兴镇KSE120-40-P2械捆扎机用行星减速机
初学plc编程应注意这三个方面,少走弯路,双线圈输出丨程序的优化设计丨编程元件的位置。双线圈输出如果在同一个程序中,同一元件的线圈使用了两次或多次,称为双线圈输出。对于输出继电器来说,在扫描周期结束时,真正输出的是最后一个Y0的线圈的状态(见a)。Y0的线圈的通断状态除了对外部负载起作用外,通过它的触点,还可能对程序中别的元件的状态产生影响。a中Y0两个线圈所在的电路将梯形图划分为3个区域。因为PLC是循环执行程序的,最上面和最下面的区域中Y0的状态相同。
永兴镇KSE120-40-P2械捆扎机用行星减速机
KFB060 -L1 -3 4 5 7 10 -S2-P2
KFB060 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
KFB080 -L1 -3 4 5 7 10 -S2-P2
KFB080 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
KFB090 -L1 -3 4 5 7 10 -S2-P2
KFB090 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
KFB120 -L1 -3 4 5 7 10 -S2-P2
KFB120 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
KFB160 -L1 -3 4 5 7 10 -S2-P2
KFB160 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
KFB115 -L1 -3 4 5 7 10 -S2-P2
KFB115 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
KFB142 -L1 -3 4 5 7 10 -S2-P2
KFB142 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
KFB60 -L1 -3 4 5 7 10 -S2-P2
KFB60 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
KFB80 -L1 -3 4 5 7 10 -S2-P2
KFB80 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
KFB90 -L1 -3 4 5 7 10 -S2-P2
KFB90 -L2 -12 15 16 25 30 35 40 32 50 70 100 28 -S2-P2
从时间调度上来说:PLC的程序一般不能按事先设定的循环周期运行。PLC程序是从头到尾执行一次后又从头开始执行。(现在一些新型PLC有所改进,不过对任务周期的数量还是有限制)而DCS可以设定任务周期。比如,快速任务等。同样是传感器的采样,压力传感器的变化时间很短,我们可以用200ms的任务周期采样,而温度传感器的滞后时间很大,我们可以用2s的任务周期采样。这样,DCS可以合理的调度控制器的资源。从网络结构发面来说:一般来讲,DCS惯常使用两层网络结构,一层为过程级网络,大部分DCS使用自己的总线协议,比如横河的Modbus、西门子和ABB的Profibus、ABB的CANbus等,这些协议均建立在标准串口传输协议RS232或RS485协议的基础上。
永兴镇KSE120-40-P2械捆扎机用行星减速机






