大庸桥街道MKB-060-4-K3-19FB19设备用伺服齿轮减速器
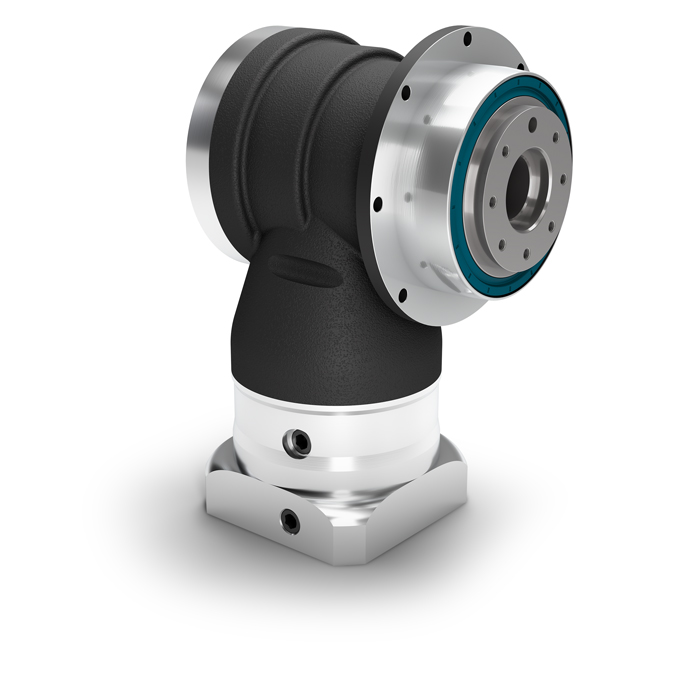
EAMON/伊明牌AB280系列精密行星减速机
产品特点:
1、全一体化设计,双支撑笼式行星架结构,拥有高可靠度,可适应频繁正反转。
2、直齿/斜齿传动,传动更平稳,更大的承载能力。
3、低回程间隙,精度高达1弧分,更准确。
4、特殊转架结构,可以承载更大的径向力和轴向力。
规格尺寸: 280
速比范围: 3~1000比
精度范围: 1~3弧分(P1级) 3~5弧分(P2级)
适用范围:适用于任何厂商所制造的驱动产品连接,如:松下、安川、三菱、西门子、台达、汇川、禾川、信捷等交直流伺服电机、步进电机的减速传动

大庸桥街道MKB-060-4-K3-19FB19设备用伺服齿轮减速器
根据所设数值与公式可以算出,电容电压的变化速率为1V/mS。这表示可以用5mS的时间获得5V的电容电压变化;换句话说,已知Vc变化了2V,可推算出,经历了2mS的时间历程。当然在这个关系式中的C和I也都可以是变量或参考量。详细情况可参考相关的教材看看。供参考。首先设电容器极板在t时刻的电荷量为q,极板间的电压为u.,根据回路电压方程可得:U-u=IR(I表示电流),又因为u=q/C,I=dq/dt(这儿的d表示微分哦),代入后得到:U-q/C=R*dq/dt,也就是Rdq/(U-q/C)=dt,然后两边求不定积分,并利用初始条件:t=0,q=0就得到q=CU1-e-t/(RC)这就是电容器极板上的电荷随时间t的变化关系函数。
大庸桥街道MKB-060-4-K3-19FB19设备用伺服齿轮减速器
HCR060-003-S1-P2
HCR060-004-S1-P2
HCR060-005-S1-P2
HCR060-007-S1-P2
HCR060-010-S1-P2
HCR060-015-S1-P2
HCR060-020-S1-P2
HCR060-025-S1-P2
HCR060-030-S1-P2
HCR060-035-S1-P2
HCR060-040-S1-P2
HCR060-050-S1-P2
HCR060-070-S1-P2
HCR060-100-S1-P2
HCR060-003-S2-P2
HCR060-004-S2-P2
HCR060-005-S2-P2
HCR060-007-S2-P2
HCR060-010-S2-P2
HCR060-015-S2-P2
HCR060-020-S2-P2
HCR060-025-S2-P2
HCR060-030-S2-P2
HCR060-035-S2-P2
HCR060-040-S2-P2
HCR060-050-S2-P2
HCR060-070-S2-P2
HCR060-100-S2-P2

写多个寄存器时发出的功能码是0FH。1x:是一个只读的设备类型,相当于读取PLC的输入点。读取位状态的时候发出的功能码为02H。3x:是一个只读的设备类型,相当于读取PLC的模拟量。读数据的时候,发出的功能码是04H。4x:是一个可读可写的设备类型,相当于操作PLC的数据寄存器。当读取数据的时候,发出的功能码是03H,当写数据的时候发出的功能码时10H,可写多个寄存器的数据。5x:该设备类型与4x的设备类型属性是一样的。
大庸桥街道MKB-060-4-K3-19FB19设备用伺服齿轮减速器






