双街镇PHF060-7-L1-P2行星减速箱设计参数表
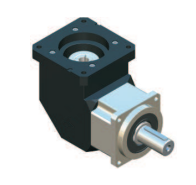
EAMON/伊明牌PG系列斜齿行星减速机
产品特点:
1、特别的法兰盘输出方式,获得更大的安装自由度。
2、机身尺寸更短,安装空间要求低。
3、低回程间隙,更准确。
4、双支撑笼式行星架结构,高可靠度,可适应频繁正反转。
5、转架装配圆锥滚子轴承,满足重载工况要求。
规格范围:
64-200
速比范围:3-100
精度范围:1-3弧分(P1级)
3-5弧分(P2级)
双街镇PHF060-7-L1-P2行星减速箱设计参数表
因此初学者只要先熟悉常用的基本单元电路,再学会分析和分解电路的本领,看懂一般的电路图应该是不难的。按单元电路的功能可以把它们分成若干类,每一类又有好多种,全部单元电路大概总有几百种。下面我们选最常用的基本单元电路来介绍。让我们从电源电路开始。电源电路的功能和组成每个电子设备都有一个供给能量的电源电路。电源电路有整流电源、逆变电源和变频器三种。常见的家用电器中多数要用到直流电源。直流电源的最简单的供电方法是用电池。

双街镇PHF060-7-L1-P2行星减速箱设计参数表
TBR90-L1-A22-19-70-90-M6
TBR90-L2-A22-19-70-90-M6
TBR90-L1-A22-19-70-90-M5
TBR90-L2-A22-19-70-90-M5
TBR090-L1-A22-19-70-90-M6
TBR090-L2-A22-19-70-90-M6
TBR090-L1-A22-19-70-90-M5
TBR090-L2-A22-19-70-90-M5
TBR090-L1-A22-19-95-115-M8
TBR090-L2-A22-19-95-115-M8
TBR090-L1-A22-14-50-70-M5
TBR090-L2-A22-14-50-70-M5
TBR090-L1-A22-12.7-73-98.43-M5
TBR090-L2-A22-12.7-73-98.43-M5
TBR090-L1-A22-22-110-145-M8
TBR090-L2-A22-22-110-145-M8
TBR60-L1-A16-14-50-70-M4
TBR60-L2-A16-14-50-70-M4
TBR60-L1-A16-14-50-70-M5
TBR60-L2-A16-14-50-70-M5
TBR60-L1-A16-16-80-100-M6
TBR60-L2-A16-16-80-100-M6
TBR60-L1-A16-8-38.1-66.66-M5
TBR60-L2-A16-8-38.1-66.66-M5
TBR060-L1-A16-14-50-70-M4
TBR060-L2-A16-14-50-70-M4
TBR060-L1-A16-14-50-70-M5
TBR060-L2-A16-14-50-70-M5
TBR060-L1-A16-16-80-100-M6
TBR060-L2-A16-16-80-100-M6
TBR060-L1-A16-8-38.1-66.66-M5
TBR060-L2-A16-8-38.1-66.66-M5
TBR90-L1-A22-19-95-115-M8
TBR90-L2-A22-19-95-115-M8
TBR90-L1-A22-14-50-70-M5
TBR90-L2-A22-14-50-70-M5
TBR90-L1-A22-12.7-73-98.43-M5
TBR90-L2-A22-12.7-73-98.43-M5
TBR90-L1-A22-22-110-145-M8
TBR90-L2-A22-22-110-145-M8
TBR115-L1-A32-19-70-90-M6
TBR115-L2-A32-19-70-90-M6
TBR115-L1-A32-19-80-100-M6
TBR115-L2-A32-19-80-100-M6
TBR115-L1-A32-22-110-145-M8
TBR115-L2-A32-22-110-145-M8
TBR115-L1-A32-24-110-145-M8
TBR115-L2-A32-24-110-145-M8
TBR115-L1-A32-24-95-115-M6
TBR115-L2-A32-24-95-115-M6
TBR115-L1-A32-19-70-90-M5
TBR115-L2-A32-19-70-90-M5
TBR115-L1-A32-19-95-115-M8
TBR115-L2-A32-19-95-115-M8
TBR142-L1-A40-24-110-145-M8
TBR142-L2-A40-24-110-145-M8
TBR142-L1-A40-32-130-165-M10
TBR142-L2-A40-32-130-165-M10
TBR142-L1-A40-35-114.3-200-M12
TBR142-L2-A40-35-114.3-200-M12
TBR142-L1-A40-38-180-215-M12
TBR142-L2-A40-38-180-215-M12
TBR142-L1-A40-22-110-145-M8
TBR142-L2-A40-22-110-145-M8

在组态概念出现之前,要实现某一任务,都是通过编写程序(如使用BASIFORTRAN语言等)来实现的。编写程序不但工作量大、周期长,而且容易犯错误,不能保证工期。组态软件的出现解决了这个问题,对于过去需要几个月的工作,通过组态几天就可以完成。组态软件一般有三种,其英文简称分别为hmMMI和SCADA。目前组态软件发展迅猛,已经扩展到企业信息管理系统、管理和控制一体化、远程诊断和维护以及在互联网上的一系列的数据整合。
双街镇PHF060-7-L1-P2行星减速箱设计参数表






