汇源街道PHF042-15-L2-P2伺服行星减速器选型手册
EAMON/伊明牌AF系列標準減速機
产品简介:
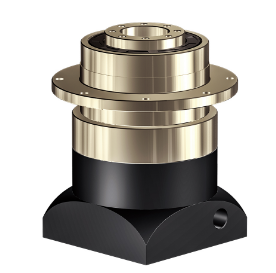
AF-系列減速機
雙支撐架構精密減速機。廣泛適用於自動化設備、鋰電池設備等。具有高精度.重量輕、體積小、傳動範圍大、效率高、運轉平穩、低噪音、經濟實用、易安裝等優點。
產品規格:
040、060、080、120、160、205、235
產品背隙:
P2:標準背隙 單節≤8弧分 雙節≤10弧分
P1:精密背隙 單節≤4弧分 雙節≤6弧分
單段速比:3、4、5、7、8、10
雙段速比:12、15、20、25、30、35、40、50、70、100
效率: 單節 ≧ 97%, 雙節 ≧ 94%。

汇源街道PHF042-15-L2-P2伺服行星减速器选型手册
PCB布局设计布局设计即是在PCB板框内按照设计要求摆放器件。在原理图工具中生成网络表(DesignCreateNetlist),之后在PCB软件中导入网络表(DesignImportNetlist)。网络表导入成功后会存在于软件后台,通过Placement操作可以将所有器件调出、各管脚之间有飞线提示连接,这时就可以对器件进行布局设计了。PCB布局设计是PCB整个设计流程中的重要工序,越复杂的PCB板,布局的好坏越能直接影响到后期布线的实现难易程度。
汇源街道PHF042-15-L2-P2伺服行星减速器选型手册
ZPNF060 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
ZPNF060 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
ZPNF060 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
ZPNF090 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
ZPNF090 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
ZPNF090 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
ZPNF115 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
ZPNF115 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
ZPNF115 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
ZPNF142 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
ZPNF142 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
ZPNF142 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
ZPNF120 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
ZPNF120 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
ZPNF120 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
ZPNF60 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
ZPNF60 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
ZPNF60 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
ZPNF90 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
ZPNF90 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
ZPNF90 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1

其磁通路径如上图的虚线所示。本结构由于其转子的圆柱形磁铁内部大部分为中空,故可做成低惯量转子。此种步进电机与HB型步进电机的比较如下:结构上,转子磁通接近正弦波分布,即转子没有齿,所以气隙磁通的分布接近正弦波,从而能降低振动和噪音,提高步距角的精度。由上面的转子外观图看出,与定子所对转子磁极的面积约为HB型转子的两倍,使交链磁通增大。HB型转子表面齿槽关系只有50%,并且前后转子齿之间相差1/2节距,而RM型转子的表面通过有效磁通。
汇源街道PHF042-15-L2-P2伺服行星减速器选型手册






