肖家河街道TMR-115-5-S2-P2行星齿轮减速机用途有哪些
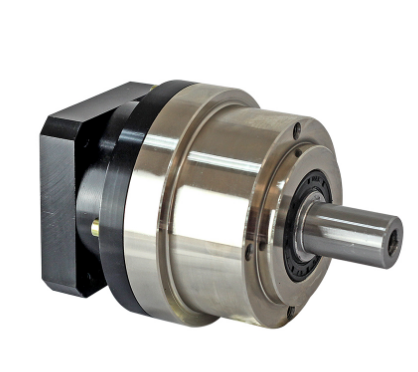
EAMON/伊明牌VRB系列-伺服电机减速机
产品特点
1. 高精度:
单节背隙低于3弧分,双节背隙低于5弧分
2. 高强度:
使用滚珠轴承,提高了刚性和扭矩
3. 安装:
伺服电机与输入法兰直连,安装简单
4. 润滑:
使用高粘度、不易分离的润滑脂,有效防止润滑脂泄漏在产品寿命期内无需更换润滑脂
肖家河街道TMR-115-5-S2-P2行星齿轮减速机用途有哪些
晶振离芯片尽量近,且晶振下尽量不走线,铺地网络铜皮。多处使用的时钟使用树形时钟树方式布线。连接器上信号的排布对布线的难易程度影响较大,因此要边布线边调整原理图上的信号(但千万不能重新对元器件编号)多板接插件的设计:使用排线连接:上下接口一致直插座:上下接口镜像对称,如下图模块连接信号的设计:若2个模块放置在PCB同一面,如下:管教序号大接小小接大(镜像连接信号)若2个模块放在PCB不同面,则管教序号小接小大接大这样做能放置信号像上面的右图一样交叉。

肖家河街道TMR-115-5-S2-P2行星齿轮减速机用途有哪些
SL050 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
SL050 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
SL060 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
SL060 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
SL070 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
SL070 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
SL090 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
SL090 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
SL120 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
SL120 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
SL155 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
SL155 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
SL205 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
SL205 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
SL50 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
SL50 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
SL70 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
SL70 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
SL90 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
SL90 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1
SL60 -L1-3 4 5 6 7 8 10 -S2-S1 -P2-P1
SL60 -L2-15 20 25 30 35 40 70 80 100 50 -S2-S1 -P2-P1

如果我高声对你喊叫,“区别什么有做这样?”这种语法结构显然让人难懂,但如果我按从右到左的顺序说,“这样做有什么区别?”那么你马上就能理解了。虽然许多半导体公司赚了很多钱,并提供很多支持,但很多时候他们专注于芯片内部,而做不到正确的原理图流向()。:目前许多公司画的原理图符号模仿的是元件的引脚图,而不是信号流向。中的六反相器U1不是很实用。它将6个反相器合成在一个符号中,并且左边和右边都有输入输出。引脚长度也不需要那么长。
肖家河街道TMR-115-5-S2-P2行星齿轮减速机用途有哪些






