兴隆街道TE-180-20-S1-P2行星减速机和rv减速机的对比
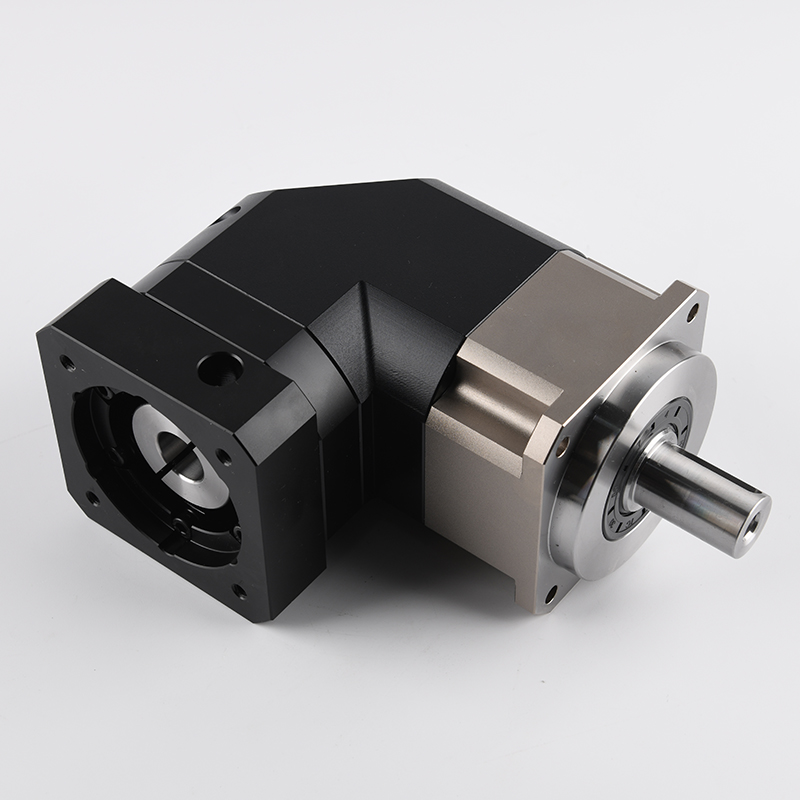
EAMON/伊明牌VRL系列高精度行星减速机
VRL系列高精度行星减速机精度分两种:体积小,整机长度短,应用于机器人,及有尺寸限制的应用,在伺服控制的应用上,发挥了良好的伺服刚性效应,准确的控制,在运转平台上具备了中低背隙,率,高输入转速,高输入扭矩,运转平順,低噪音等特性,外观及结构设计轻小。使用终身免更换的润滑油,及无论安装在何处 ,都可以免维修操作全封闭式设计,并且具有IP65的保护程度,因此工作环境差时亦可使用。
特点
可提供6种机架规格
齿隙为3角分
转矩可达5200NM·
径向负载能力42000N
可提供3:1至1000:1的比例
可连接任何一款电机
工作寿命在20000小时左右
优势
性能稳定,价格具有竞争力
高精度行星齿轮箱,法兰输出,性能卓越,特别适用于动态性能和可靠性等要求高的间歇工作(S5)和连续工作(S1)
大负载惯量的惯量匹配
通过减速增加转矩
“终身润滑”减速箱无需泄漏或除污维护
适用于多种行业和应用,包括:
— 机械手及工业机器人
— 印刷与纸品加工
— 数控机床加工设备
— 军工航天设备
— 半导体晶圆制造
— 涂层和胶片冲洗
— 高速电子组装EVS系列高精度行星减速机

兴隆街道TE-180-20-S1-P2行星减速机和rv减速机的对比
不同的串行通信的传输速率差别极大,有的只有数百bps,有的可达100Mbps。单工通信与双工通信串行通信按信息在设备间的传送方向又分为单工、双工两种方式。单工通信方式只能沿单一方向发送或接收数据。双工通信方式的信息可沿两个方向传送,每一个站既可以发送数据,也可以接收数据。双工方式又分为全双工和半双工两种方式。数据的发送和接收分别由两根或两组不同的数据线传送,通信的双方都能在同一时刻接收和发送信息,这种传送方式称为全双工方式;用同一根线或同一组线接收和发送数据,通信的双方在同一时刻只能发送数据或接收数据,这种传送方式称为半双工方式。

兴隆街道TE-180-20-S1-P2行星减速机和rv减速机的对比
ZDH120L2-20-22-110
SP100S-MC2-28-1G1-3K
SP180S-MC1-7-1M1-2K
DH120L1-4-22K6-110
MF90XL1-5-19-80-T
MF180SL2-50-24-110
MFT120-S2-L1-5-K-22-110
MFT120-S2-L1-5-K-22-110
MFT120-S1-L1-5-K-24-110
MF120SL2-25-24-110
PHFR115T-20-P2
PHFR142T-20-ArcminP2
MF120H-L2-25-M-K-24-110
MF120H-L2-20-M-K-24-110
MF150H-L2-25-M-K-35-114.3
RAH-090-002
RAH-090-005
RAH-060-002
RAH-060-005
MF60XL1-7-K-14-50-T
PG60L1-4-14-50
PG60L2-15-14-50-T
PG60FL1-10-14-50-S
MX150L1-7-K-34-114
PX90L1-3-19-70
LPK120-30-P2
WPF115-30-P2
MF150HL3-150-M-K-22-95
MF150HL3-120-M-K-22-110
MF090L1-3-19-70
PG90L2-50-14-50-S
MF180SL2-100-24-110
MF180SL2-12-35-114
MF120SL2-35-24-110-S-L
PG120L3-343-22-110
ZDH120L3-343-22-110
PG120-L1-10-22-110
ZDH120L3-343-22-110
MF60HL2-60-H-K-14-50
MF150XL1-10-K-42-114
MF150XL1-5-K-35-114
MF150XL1-10-K-35-114
PB142-7-P2
PB120-6-P2
WS90F-20-19-70-90-M6
MF120H-L1-05-HS-S10
MF120H-L1-05-HS-S11
MF120H-L1-10-HK-S8
MF120H-L1-05-HS-S8
PG120L2-100-19-70
PG120FL2-30-22-110
pg90l2-40-16-80
PG120FL2-100-14-50
PG90L2-20-19-70
MF180SL3-250-32-130
MF120HL2-30-M-K-24-110
PG90L1-10-14-73
PG90L1-5-14-73
PG120FL2-20-22-110
PG120L2-100-19-70
PG120FL2-20-22-110
PF120L2-20-22-110
PG120L1-10-24-110-145
然后将这写变量写入模块引脚:模块赋值配置模块MB_COMM_LOAD的触发REQ只需要在连接时触发一次啊,因此直接将系统内置的变量“firstscan”写入即可,上电后执行一次。由于通讯的读和写都由主站模块MB_MASTER完成,因此我们对这个模块进行两次赋值,次实现读的功能,由modbus地址40100开始,读5个数据,写入"ModbusData".Read_Data中;第二次实现写的功能,将"ModbusData".Sent_Data中的数据写入由modbus地址40110开始的5个数据中。
兴隆街道TE-180-20-S1-P2行星减速机和rv减速机的对比






