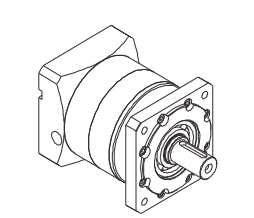
高何镇PHFZ115-15-L2-P1行星减速机速比表标准
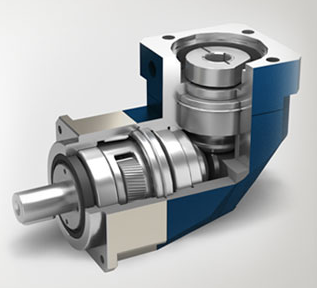
EAMON/伊明牌MD系列中空旋转平台,内部齿轮采用海波型齿轮,具有高精度,率,高扭矩,低磨耗等特点,产品体积小,中空设计方便穿线管类,相比于一般的中空平台负载更大,精度更高,常用余五轴加工设备,高精密点胶,装配,检测设备;
额定输出力矩
110Nm-450Nm
减速比(单节)
30
标准背隙
≤5弧秒
高工作效率(单节)
≥98
产品规格
MD100/MD150/MD200
高何镇PHFZ115-15-L2-P1行星减速机速比表标准
,M1=ON、M3=ON情况3修改M1值为OFF状态,M3值为ON状态,发现Y1=ON。以上可以发现执行线圈的双重输出,输出结果以最下面的线圈为准。这时为什么呢,我们知道PLC程序指令顺序是按照从上到下,从左到右进行处理的,因此双线圈无论前面的状态如何都以最后的线圈为输出结果。那么怎么改变上面的双线圈输出呢,采用并联的方法来实现:双线圈对策这样M3就不会影响M1的作用了,在写程序时候经常会遇到这种情况尤其是步数较多时,写后面的时候会忽略前面的输出,编译时三菱plc是不会报错的,怎么办,我们在程序对程序进行一次检查,点击工具程序检查:程序检查点击执行后会在下面的输出结果报错:程序检查结果这样就检查了双线圈输出避免了不必要的调试。
高何镇PHFZ115-15-L2-P1行星减速机速比表标准
FXKBR190-3-S2-P2-55
FXKBR190-4-S2-P2-55
FXKBR190-5-S2-P2-55
FXKBR190-7-S2-P2-55
FXKBR190-10-S2-P2-55
FXKBR190-12-S2-P2-55
FXKBR190-15-S2-P2-55
FXKBR190-16-S2-P2-55
FXKBR190-20-S2-P2-55
FXKBR190-25-S2-P2-55
FXKBR190-28-S2-P2-55
FXKBR190-30-S2-P2-55
FXKBR190-35-S2-P2-55
FXKBR190-40-S2-P2-55
FXKBR190-50-S2-P2-55
FXKBR190-70-S2-P2-55
FXKBR190-100-S2-P2-55
FXKBR190-64-S2-P2-55
FXKBR190-80-S2-P2-55
FXKBR190-150-S2-P2-55
FXKBR190-200-S2-P2-55
FXKBR190-250-S2-P2-55
FXKBR190-350-S2-P2-55
FXKBR190-400-S2-P2-55
FXKBR190-500-S2-P2-55
FXKBR190-700-S2-P2-55
FXKBR190-1000-S2-P2-55
FXKBR220-3-S2-P2-42
FXKBR220-4-S2-P2-42
FXKBR220-5-S2-P2-42
FXKBR220-7-S2-P2-42
FXKBR220-10-S2-P2-42
FXKBR220-12-S2-P2-42
FXKBR220-15-S2-P2-42
FXKBR220-16-S2-P2-42
FXKBR220-20-S2-P2-42
FXKBR220-25-S2-P2-42
FXKBR220-28-S2-P2-42
FXKBR220-30-S2-P2-42
FXKBR220-35-S2-P2-42
FXKBR220-40-S2-P2-42
FXKBR220-50-S2-P2-42
FXKBR220-70-S2-P2-42
FXKBR220-100-S2-P2-42
FXKBR220-64-S2-P2-42
FXKBR220-80-S2-P2-42
FXKBR220-150-S2-P2-42
FXKBR220-200-S2-P2-42
FXKBR220-250-S2-P2-42
FXKBR220-350-S2-P2-42
FXKBR220-400-S2-P2-42
FXKBR220-500-S2-P2-42
FXKBR220-700-S2-P2-42
FXKBR220-1000-S2-P2-42

Nr=50,θs=0.9°的步进电机,按式θs=180°/PNr计算,则P=4,即为四相步进电机。这里需要注意的是上文两相步进电机中图所述的的两相单极线圈虽然有四个线圈,但不是四相电机。四相步进电机因其为偶数相,驱动电路的功率管要用16个,定子的主极个数也为16个,均为两相步进电机的两倍,所以造成其驱动器结构复杂,成本高,因此只有特殊用途才使用。现在市面上销售的步进电机中,相数最多的电机为五相。
高何镇PHFZ115-15-L2-P1行星减速机速比表标准






