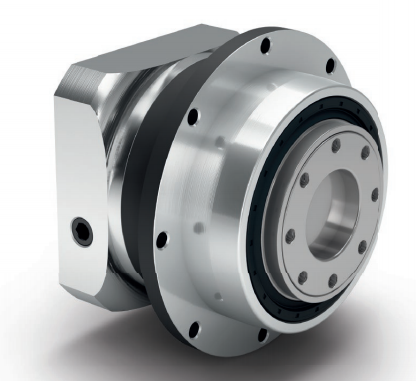
平乐镇轻载伺服齿轮箱PLME060-50-S2-P1硬轴承
EAMON/伊明牌VRB060精密行星减速机减速比:
单段速比:3, 4, 5, 7, 10;
双段速比:15, 20, 25, 30, 35, 40, 50, 70, 100;
VRB060精密行星减速机背隙:
单段:≤3arcmin / ≤5arcmin(P1/P2);
双段:≤5arcmin / ≤7arcmin(P1/P2);
VRB060精密减速机输出额定力矩:
T2N:34 Nm - 50 Nm;
VRB060精密行星减速机效率:
单段:≤ 97%;
双段:≤ 94%;

平乐镇轻载伺服齿轮箱PLME060-50-S2-P1硬轴承
上次投稿“欧姆龙和西门子一键启停PLC编程方法图解看完秒懂。”链接:m431651.html根据这个网有提出的问题,我专门编写一个这样程序,内容:5台电机顺序启动Y0.Y1.Y2.Y3.Y4.Y5,间隔5秒,然后停止时间间隔5秒,逆停:Y5.Y4.Y3.Y2.Y1.。程序编写完成,我截图给分享给大家。为了验证程序实用性,我专门在线仿真一下,我也截图分享给大家。我用的是台达编程软件,特地加上注释,分享给的大家,方便大家熟悉和后期在自己练习。
平乐镇轻载伺服齿轮箱PLME060-50-S2-P1硬轴承
MPVB-090A-003-P2-19-70-90
MPVB-090A-004-P2-19-70-90
MPVB-090A-005-P2-19-70-90
MPVB-090A-006-P2-19-70-90
MPVB-090A-007-P2-19-70-90
MPVB-090A-008-P2-19-70-90
MPVB-090A-010-P2-19-70-90
MPVB-090A-012-P2-19-70-90
MPVB-090A-015-P2-19-70-90
MPVB-090A-020-P2-19-70-90
MPVB-090A-025-P2-19-70-90
MPVB-090A-030-P2-19-70-90
MPVB-090A-035-P2-19-70-90
MPVB-090A-040-P2-19-70-90
MPVB-090A-050-P2-19-70-90
MPVB-090A-060-P2-19-70-90
MPVB-090A-070-P2-19-70-90
MPVB-090A-080-P2-19-70-90
MPVB-090A-100-P2-19-70-90
MPVB-115A-003-P2-22-110-145
MPVB-115A-004-P2-22-110-145
MPVB-115A-005-P2-22-110-145
MPVB-115A-006-P2-22-110-145
MPVB-115A-007-P2-22-110-145
MPVB-115A-008-P2-22-110-145
MPVB-115A-010-P2-22-110-145
MPVB-115A-012-P2-22-110-145
MPVB-115A-015-P2-22-110-145
MPVB-115A-020-P2-22-110-145
MPVB-115A-025-P2-22-110-145
MPVB-115A-030-P2-22-110-145
MPVB-115A-035-P2-22-110-145
MPVB-115A-040-P2-22-110-145
MPVB-115A-050-P2-22-110-145
MPVB-115A-060-P2-22-110-145
MPVB-115A-070-P2-22-110-145
MPVB-115A-080-P2-22-110-145
MPVB-115A-100-P2-22-110-145

开始自整定后,给定值不能再改变。第五步:如果用户想将PID自整定的参数应用到当前PLC中,则只需点击更新PLC。注意:完成PID调整后,一次整个项目(包括数据块),使新参数保存到CPU的EEPROM中。PID自整定失败的原因PID输出在值与值之间振荡(曲线接触到坐标轴)PID响应曲线图解决方法:降低PID初始输出步长值经过一段时间后,PID自整定面板显示如下信息:“自整定计算因为等待反馈穿越给定值的看门狗超时而失败”。
平乐镇轻载伺服齿轮箱PLME060-50-S2-P1硬轴承






