上唐镇PSR090-L1-3-S2-P2高力矩行星减速箱
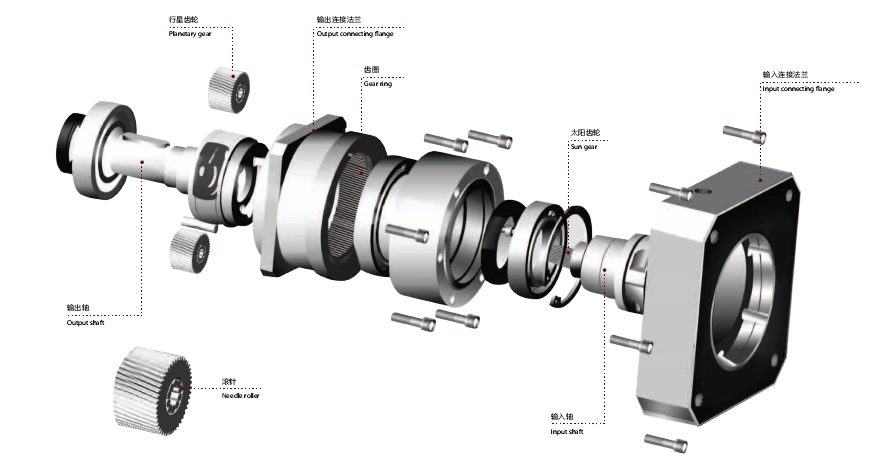
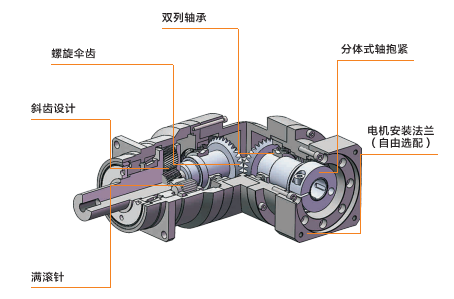
EAMON/伊明牌HDR系列直角行星减速机
法兰外径:60mm
减速机机型:HD(平行轴斜齿精密型)
减速机体型:R(90°直角输出,直角型)
减速比:单段=3-20;双段=15-200
出力轴键槽:S(标准品,带键槽)、S1(实心轴,无键槽)、T(特殊)
背隙等级:单段:P0≤1,P1≤3,P2≤5;双段:P0≤3,P1≤5,P2≤7
上唐镇PSR090-L1-3-S2-P2高力矩行星减速箱
三相异步电动机的基本接线。三相异步电动机绕组出来的六根线可以分为两种最基本的接法:三角形△接法和星形接法。六根线=三个电机绕组=三个首端+三个尾端,万用表测量同绕组首尾端相通,即:U1—U2,V1—V2,W1—W2。1,三相异步电机三角形△接法。三角形△接法就是将三个绕组首尾端依次相连,构成三角形。接法:2,三相异步电机星形接法。星形接法就是将三个绕组的尾端或者首端相连,另外三根线作为电源接线。

上唐镇PSR090-L1-3-S2-P2高力矩行星减速箱
FABR060 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
FABR060 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
FABR060 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
FABR090 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
FABR090 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
FABR090 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
FABR115 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
FABR115 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
FABR115 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
FABR142 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
FABR142 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
FABR142 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
FABR120 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
FABR120 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
FABR120 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
FABR60 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
FABR60 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
FABR60 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
FABR90 -L1 -3 4 5 6 7 8 10 -S2 -S1 -P2 -P1
FABR90 -L2 -12 15 16 25 30 35 40 -S2 -S1 -P2 -P1
FABR90 -L2 -32 50 60 70 80 100 28 -S2 -S1 -P2 -P1
在组态概念出现之前,要实现某一任务,都是通过编写程序(如使用BASIFORTRAN语言等)来实现的。编写程序不但工作量大、周期长,而且容易犯错误,不能保证工期。组态软件的出现解决了这个问题,对于过去需要几个月的工作,通过组态几天就可以完成。组态软件一般有三种,其英文简称分别为hmMMI和SCADA。目前组态软件发展迅猛,已经扩展到企业信息管理系统、管理和控制一体化、远程诊断和维护以及在互联网上的一系列的数据整合。
上唐镇PSR090-L1-3-S2-P2高力矩行星减速箱






