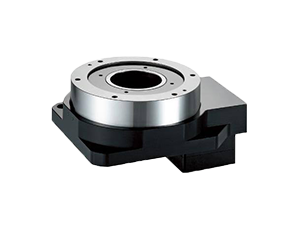
勐养镇PSS060-L1-7-S2-P2机械用伺服齿轮减速器
EAMON/伊明牌VRB060精密行星减速机减速比:
单段速比:3, 4, 5, 7, 10;
双段速比:15, 20, 25, 30, 35, 40, 50, 70, 100;
VRB060精密行星减速机背隙:
单段:≤3arcmin / ≤5arcmin(P1/P2);
双段:≤5arcmin / ≤7arcmin(P1/P2);
VRB060精密减速机输出额定力矩:
T2N:34 Nm - 50 Nm;
VRB060精密行星减速机效率:
单段:≤ 97%;
双段:≤ 94%;
勐养镇PSS060-L1-7-S2-P2机械用伺服齿轮减速器
我们重点看下位置环是如何确保电机能够准确旋转给定的角度。假如我们给定脉冲为1个,此时反馈脉冲为0,脉冲偏差△p=1,输入到控制器中,这时候驱动电路控制IPM逆变器产生SPWM波驱动伺服电机旋转,注意这个SPWM波和我们plc发脉冲的方波是不一样的,时电机带动编码器旋转发出反馈脉冲,这个时候△p=0,电机停止输出,1个脉冲完成。整个从发出脉冲到接受反馈脉冲的过程就是一个闭环过程,从而确保电机能够准确,脉冲的数量决定的距离,脉冲的频率决定电机的转速。

勐养镇PSS060-L1-7-S2-P2机械用伺服齿轮减速器
MF120SL3-100-19-70
PG120FL2-35-22-95
PG120FL2-35-22-110
PG120FL2-35-24-95
PG120FL2-35-14-50
PG120FL2-35-19-70
PG120FL2-35-19-95
PF120L2-35-22-95
PF120L2-35-22-110
PF120L2-35-24-95
PF120L2-35-14-50
PF120L2-35-19-70
PF120L2-35-19-95
PG120L2-35-22-95
PG120L2-35-22-110
PG120L2-35-24-95
PG120L2-35-14-50
PG120L2-35-19-70
PG120L2-35-19-95
PF090L1-005-19-70
PF90L1-5-19-70
PHTDS120L2-35-24-110
MF120HL2-35-H-K-24-110-S
PAII090-005-S2
PG60L1-10-14-50-S14
PG60L1-5-6.35-38.1
PG60L1-10-6.35-38.1
PG90L1-10-16-70-Y
PF90L1-10-16-70-Y
PF90L1-10-16-80-Y
PF60L1-3-14-50-Y-14-16
PG60L1-10-14-50-Y-14-16
PG60L1-5-14-50-Y-14
MF90XL1-5-K-19-70
MF90XL1-5-S-19-70
MF90XL1-7-19-70
PG60L1-10-14-50-S-16
DHDL090L2-9-15-20-25-30-19-70
PF90L1-5-19-70
ZDM120L2-15-25-30-20-22-110-1.5KW
MF150XL1-5--K-35-114
MF150XL1-5-K-42-114
MF150XL1-5-K-28
MF070SL2-12-8-30
MF070SL2-12-11-50
MF070SL2-12-14-50
NP015S-MF1-3-1C1-1S
SP210S-MF1-5-1N1-2S
PG120FL2-50-19-95
PG120FL2-50-19-110
PG120FL2-50-24-110
PG120FL2-50-16-70
PG120FL2-50-16-80
PG120FL2-50-19-70

学习高速计数器的应用学习运动控制的相关指示灯学习PLC脉冲输出指令的使用学习运动控制库的使用学习运动控制向导的使用练习编写控制伺服、步进的控制程序最后就开始通信课程内容的学习,这一点大家一定要去结合书本资料和老师讲解来学习,并拿一个实际的PLC设备去和各种智能设备实现一个通信,看能否达到控制要求,重在拿实际的设备去练习。大家可以按照以下几个重点去学习,相信只要大家把下面几点内容掌握了,并结合实际的一些实操训练,一定能在最短时间内把通讯方面的知识用到自己的工作当中具体内容如下:自由口通信的学习Modbus通信的学习USS通信的学习Profibus通信的学习OPC通信的学习应用练习按照以上的流程和老师的指导去学习,相信大家不用半年就可以把PLC的应用熟练的掌握,在此,祝大家学习进步。
勐养镇PSS060-L1-7-S2-P2机械用伺服齿轮减速器






