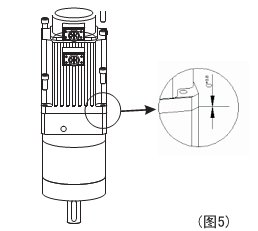
海南镇PSR090-L2-15-S2-P1行星减速器机器人关节
EAMON/伊明牌ADR064精密行星减速机选型参数:
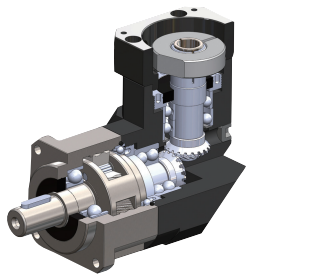
ADR064斜齿轮盘式行星减速机减速比:
单段速比:4, 5, 7, 10, 14, 20;
双段/三段速比:25, 35, 40, 50, 70, 100, 140, 200;
ADR064斜齿轮盘式减速机背隙:
单段:≤6arcmin(P2);
双段:≤9arcmin(P2);
ADR064斜齿轮盘式减速机额定力矩:
T2N:40 Nm - 60 Nm;
ADR064斜齿轮盘式减速机效率:
单段:≤ 95%;
双段:≤ 92%;
海南镇PSR090-L2-15-S2-P1行星减速器机器人关节
过流保护过流保护公式可参考如下:T=(K*S/I)3)其中,T表示切断负载电路所需时间;K表示绝缘铜导线系数;S表示导线的截面积;I表示短路时电流大小。通过以上三个公式我们可以清楚的看出,动力和控制电路在设计中首先考虑的是机床器件的额定电流和线路负载电流,之后确定机床中使用导体线缆的横截面积。当截容量达到1.45倍时是安全临界点,超过这个临界点时就会比较危险,要确保安全,必须在规定时间内通过。在达到Imax之前必须切断电源。

海南镇PSR090-L2-15-S2-P1行星减速器机器人关节
FBR060-3-4-5-6-7-8-10-14-15-16-20-25-S2-P1
FBR060-28-30-35-40-50-60-70-80-100-S2-P1
FBR60-3-4-5-6-7-8-10-14-15-16-20-25-S2-P1
FBR60-28-30-35-40-50-60-70-80-100-S2-P1
FBR090-3-4-5-6-7-8-10-14-15-16-20-25-S2-P1
FBR090-28-30-35-40-50-60-70-80-100-S2-P1
FBR90-3-4-5-6-7-8-10-14-15-16-20-25-S2-P1
FBR90-28-30-35-40-50-60-70-80-100-S2-P1
FBR115-3-4-5-6-7-8-10-14-15-16-20-25-S2-P1
FBR115-28-30-35-40-50-60-70-80-100-S2-P1
FBR142-3-4-5-6-7-8-10-14-15-16-20-25-S2-P1
FBR142-28-30-35-40-50-60-70-80-100-S2-P1
FBR180-3-4-5-6-7-8-10-14-15-16-20-25-S2-P1
FBR180-28-30-35-40-50-60-70-80-100-S2-P1
FBR220-3-4-5-6-7-8-10-14-15-16-20-25-S2-P1
FBR220-28-30-35-40-50-60-70-80-100-S2-P1
增量编码器又称为脉冲盘式编码器,增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。增量编码器结构与工作原理增量式编码器通过判断B相位差,是超前还是落后90度,可以判断编码器的旋转方向。增量式编码器输出的脉冲信号一般连接计数器、pl计算机,连接方式有3种如下:单相连接,用于单方向计数,单方向计数的时候。B两相连接,用于正反计数、判断正反方向和测试速度;Z连接用于带参考位置测量。
海南镇PSR090-L2-15-S2-P1行星减速器机器人关节






